I'm trying to make an override code
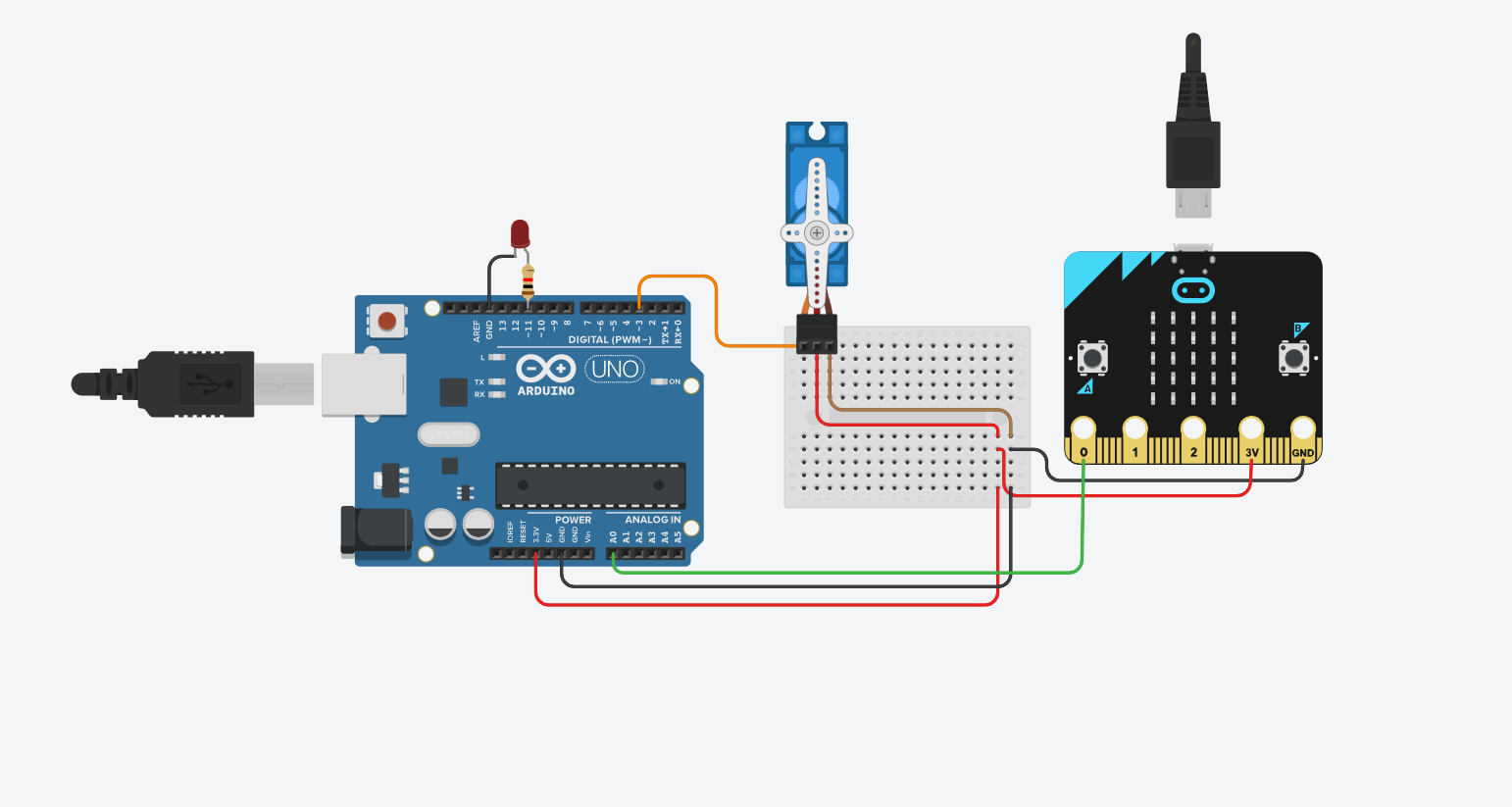
So, for context, I am making a system where the servo motor is constantly on an automatic sweeping motion. The micro:bit sends an analog signal from pin 0. If its high, it will activate an override code
Problem is... the override code doesn't work. And the servo either freezes or the override doesn't activate.
22 Replies
here's the entire code, and... I gotta admit, it sucks for a newbie like me
Allready tried helping you you never replied now your crossposting
Smells like GPT Chat.
Oh uh... dang... I slept because of, yeah. Timezones. Apologies
yep, I'm guilty for that one~
this is version two tho
im still open to suggestions, I'm kind of new
also, please don't expect me to reply immediately, I'm from the Philippines and we might have different active times
1. what device are you using - as in arduino
I'm using an Arduino as the main microcontroller
micro:bit for the inputs
I plan to use micro:bits for radio
I may use a radio receiver or smth but...
I'm broke. And as you can see in the pic
I use Tinkercad
What is it you actually want to do ?
So here's my whole plan:
- I basically want to make hardware for a TF2 Sentry + wrangler. I thought this is the best idea for my first project
You know these stuff right?
So you want the unit to receive codes - via the Micro from the wireless wrangler
Yep
So more details:
You have created the wrngler ?
Almost, the thing above is a prototype
I'm just testing micro:bit as an input
The radio function and the gyroscope function will actually be useful
You get what I'm saying so far, right?
Yes - relatively simple
Oh good
so can I explain my plans now?
Yeah sure.
So... what I wanna do is:
✅ Build hardware for the sentry itself
✅ Prototype the receiver and sender with micro:bit code
- I kind of did that by experimenting with buttons in the micro:bit
Things I haven't done yet:
- Radio inputs
- Harnessing the built-in gyroscope for aiming
- Or, using the buttons for aiming left and right, and tilting up and down for aiming up or down
- Experimenting with joysticks
- Building the 3D model for the sentry itself (which is already hard if I didn't have a 3D PRINTER YET)
- Buying the materials for the project
I'm still learning this stuff... well, I got into HTML and heard about Arduino some time ago, this is relatively new to me
It is just now that I had enough free time to pursue this hobby lol
breaking tasks out into functions can help organize the code
https://wokwi.com/projects/432710592056814593
@jermany why use a uno - why no use an esp32 with inbuilt wireless and bluetooth ?
Baby steps
oh neat, thanks!
It is more difficult to work an uno receiving information from a micro than just using a stand alone esp32
wait a minute
it also uses void setup/loop
hold up
THANK YOU ALL
SO MUCH
I picked the right community for this...
if you're all good now please mark this thread Answered