
 D
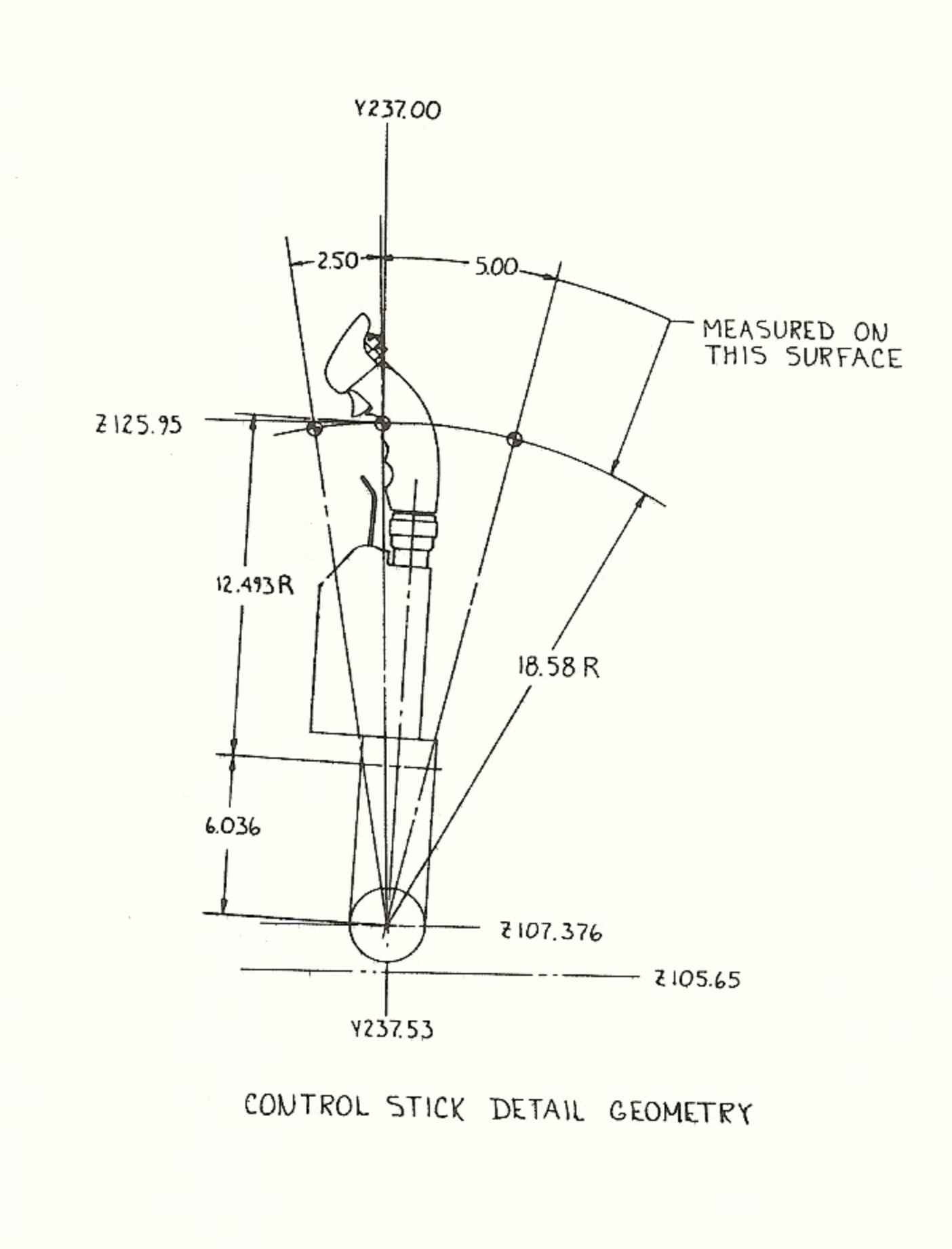
Dwell.. it's about 150mm from the pivot to the base of the grip

 J
JKeeps the stick from striking MFDs mounted in the front.
Dthe limiters should be doing this yes

 P
Phey guys I'm not very good when it comes to electricity/electronics but would an extra layer of shielding help? Like another layer of heat wrap? With electricity not really going through the wires I'm guessing that's what causes the 'noise' when the wires are bunched up & not when they're out straight? Then would the extra layer of heat wrap help or not really? More curious than anything now 

 N
NIDK. Perhaps if the cable was shielded, it wouldn't have been a problem in the first place.. but I can't think of anything you could do to the cable externally that might help, and still be able to get it all back in the tube. The cable on these extensions is obscenely long. I ended up taking about 12cm out of the top half of the cable and soldered it back together.. working perfectly now.
PAhh ok cool, why does it have to be so long? I'm not familiar with Virpil, but does it need some slack for plugging in the grip?
NYou can pull the connector out at the bottom to assist in attaching it to the base. But it only needs maybe 3-5cm of slack for that to work. Like I said, I cut out about 12 cm and could have probably taken a little more.
NWhat’s the proper way to set up for DCS community mod modules that don’t support FFB (Herc) so the stick just acts like a regular joystick? By default the stick is just limp. Are we supposed to enable “sticky” in the spring effects or is there a better way to handle this dynamically?
PThe telem app should give basic ffb effects to aircraft
Pyou may need to add it to the telem app config file, might need someone else to help with that though sry
Pcheck through support here you should find convo on it
 W
WTelemFFB def has the framework for this, with a few lines it will be possible to add a spring and other effects for non FFB aircraft. However until this is done you can use the "sticky" feature.
 J
JTelem is what makes modules come alive. Is it possible to get a list of the commands available with notes for implementation? I realize it is still WIP and will grow over time.
 P
P@walmis Do I need to order anything extra like a limiter so my stick will behave like the F/A 18 specs ?? I seem to recall something about a limiter in the order form ?
 P
PYeah m8, you can order limiter plates when you place your order, you can also buy these anytime. The Rhino software does have a endstop feature that you can change per config, but the physical endtop plates are obviously going to be a bit more solid. I believe you can also get the 3d files to print them yourself
 T
TThe limiter is in the knowledge-base.
You can change the dimensions to your liking and print it.
https://discord.com/channels/965234441511383080/1092338475795238962
You can change the dimensions to your liking and print it.
https://discord.com/channels/965234441511383080/1092338475795238962
DFor me one of the reasons to go FFB is so you can configure endstops on the fly so to speak, without having to assemble/dissasemble.
However physical plates are more solid, but I would still want something that could attach/detach quickly rather than screwing and unscrewing when I want to change the range
However physical plates are more solid, but I would still want something that could attach/detach quickly rather than screwing and unscrewing when I want to change the range
PPerfect, thanks.
JHe made one for me that is very close. Limits forward and rearward travel. The software calibrates to the physical limit so you lose no input authority.
 H
Hgents, I'd like to assign two buttons of my throttle for the Y axis trim,
H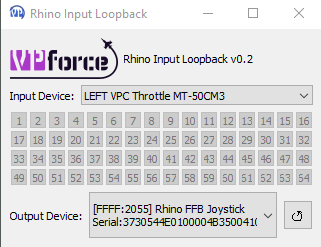 H
Hdo you know what is the right procedure? When I run the loopback the main windows does not catch the buttons...

 L
LIsn't Virpil is natively supported? Should work without loopback.
LWait this is the THROTTLE
 A
Aone way to get ffb throttle
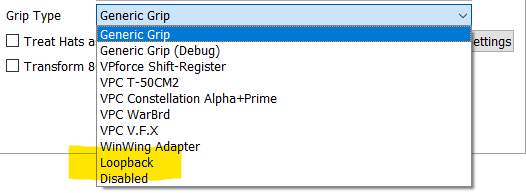
LTry selecting Loopback here then try the buttons
 A
Aanyway it shouldn't matter what you use for the loopback, it should still work
HThank you very much!
 J
Jhttps://www.reddit.com/r/hoggit/comments/nc3684/my_tool_to_programmatically_control_virpil_leds/ Since I hadn't seen this mentioned before figured I'd share as I'm curious - would this let Rhino Virpil users control the LEDs? Or since it is github be modified in such a way so as to do so? Food for thought 
reddit
54 votes and 42 comments so far on Reddit
 W
WUnlikely, this library controls LEDs through high level HID commands available with the base itself. What is unknown to me yet is the protocol used on the physical/electrical layer between the base and grip. One way to figure this out would be to grab a Virpil base and capture some traces with a logic analyzer. I'll grab a base eventually like I did with the WinWing, though the WW grip adapter had higher priority and LED control would be a nice-to-have 
JYeah for sure makes sense. Definitely an interesting topic, and the way it works could potentially open up some possibilities in the future
 S
SJust got my unit and it's impressive. However, I do hear creaking when moving the stick around, with it being more prominent under higher spring forces. It can also be heard when the unit is off, almost like a bit of sticktion and happens more with the X-axis. It's not the boot (which makes its own expected noise) and seems to be coming from the unit itself. Has anyone else encountered this?
NI do get some creaking on mine. Best o can tell is it comes from the joint between the extension and the base and not anything internal. Perhaps where the plastic threaded piece of the base joins to the aluminum tube that comes up from the gimbal.
I can hold the gimbal in place with one hand and “tweak” the extension/grip left/right and produce the same creaking.
I can hold the gimbal in place with one hand and “tweak” the extension/grip left/right and produce the same creaking.
NS A
AI get some of that too
AI think it's just the leather dust cover though
SThis is mine. It actually gets worse when the unit is off. I don’t seem to be able to reproduce it just by tweaking the extension. It almost seems like something is catching through certain movements. I don’t suppose there’s anything to lube?
 S
SThe dust cover makes sounds which is totally normal and expected, but this isn’t that.
AOh yeah, think I caught what you meant now
ACan't say what it is, it's not something I can replicate
SAh, sometimes it happens less with certain spring/damper settings. On mine it's consistent with the unit off or after going through certain angles with the unit on, which makes me wonder if something "catches".
 A
Aso I had an issue where under heavy spring forces, there would be a sort of
pop or like a release, not sure if it's related -- but the fix for me was to tighten the bolts on the large 3d printed gear, might be just worth making sure they are firmly tightened K
KMine doesn't do this at all...
SWhen you hold the gimbal in place, are you holding onto the big gear? When I hold the big gear and apply different mild pressures while moving the stick, I can make the creaking go away/get worse, as if there's some give between big gear and the internal gimbal that might be allowing the creaking. I wonder if there's anything to tighten or lube.
 N
Nno.. grasping the shaft below the extension in one hand (effectively, what's inside the boot) and the grip/extension with the other.. I can make it "creek" just by applying torque to that joint.. unsure if its the threaded connection between the extension and base, or if its the connection between the square aluminum tube and the threaded plastic piece where you attach the extension/grip
N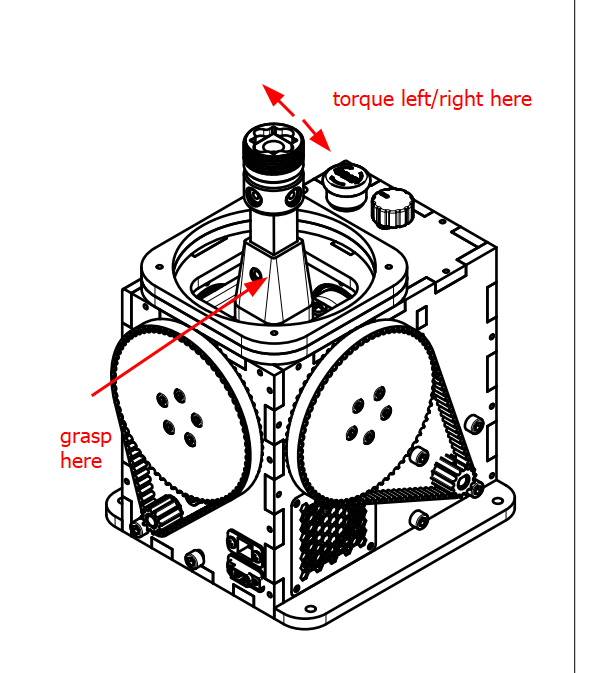 S
SAh I guess my creak situation is a little different.
 J
JI took mine apart and tightened what I believe was this screw (been a while)

 H
HHi, is it possible to submit telemetry to my Rhino rudder too? It auto connects with my Rhino Jostick . On github i found -D or --device is used to specify the Rhino device USB VID:PID (default is "ffff:2055"). So it is only possible if i install the complete python project?