 B
BHelppppppp
BI only have today
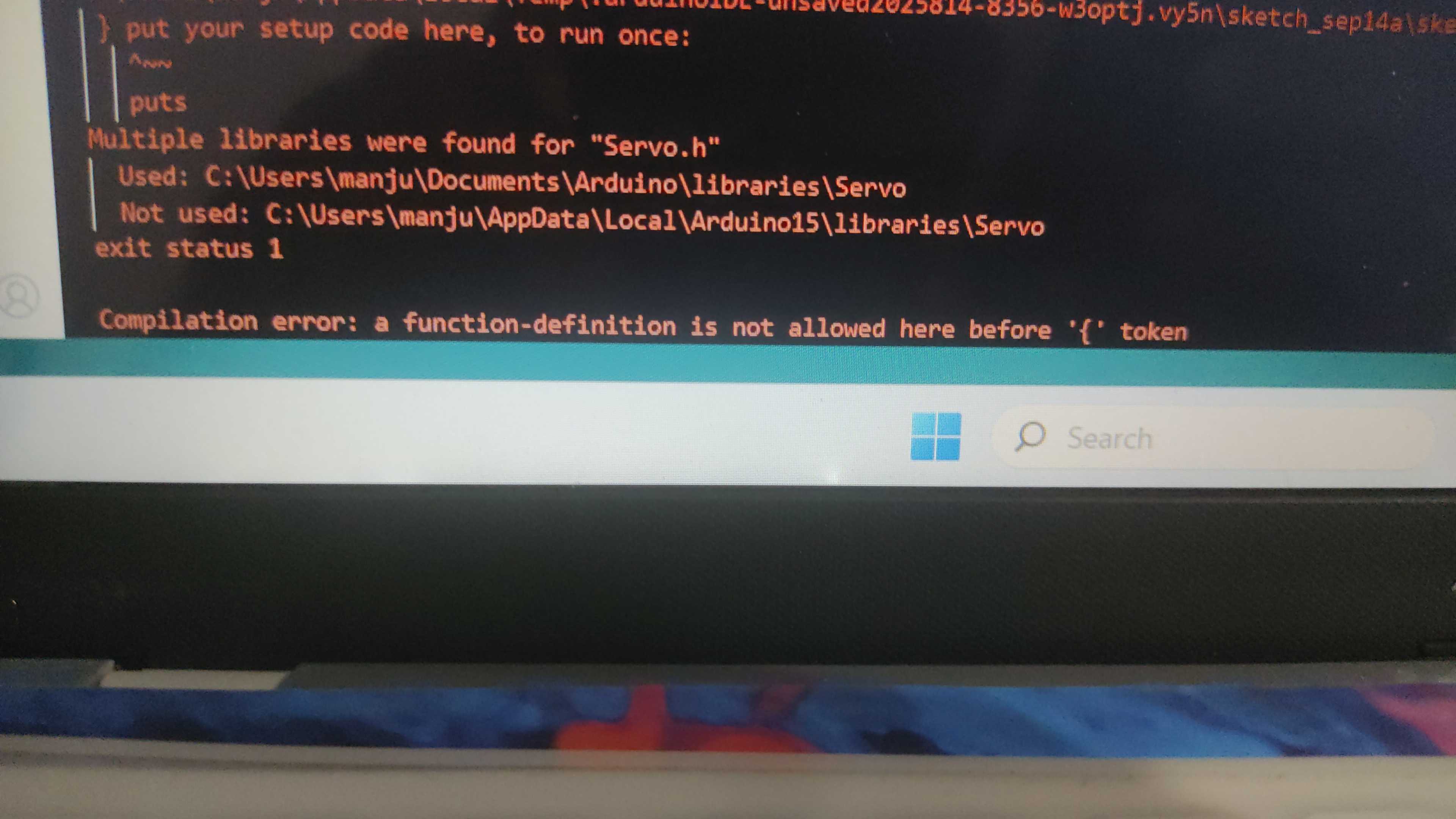
B#include <Servo.h>
Servo horizontal; // Horizontal Servo Motor
int servohori = 180;
int servohoriLimitHigh = 175;
int servohoriLimitLow = 5;
Servo vertical; // Vertical Servo Motor
int servovert = 45;
int servovertLimitHigh = 100;
int servovertLimitLow = 1;
// LDR pin connections
int ldrlt = A0; // Bottom Left LDR
int ldrrt = A3; // Bottom Right LDR
int ldrld = A1; // Top Left LDR
int ldrrd = A2; // Top Right LDR
void setup() {
horizontal.attach(2);
vertical.attach(13);
horizontal.write(180);
vertical.write(45);
delay(2500);
}
void loop() {
int lt = analogRead(ldrlt); // Top left
int rt = analogRead(ldrrt); // Top right
int ld = analogRead(ldrld); // Bottom left
int rd = analogRead(ldrrd); // Bottom right
int dtime = 10;
int tol = 90; // Tolerance value for adjustment
int avt = (lt + rt) / 2; // Average value of top sensors
int avd = (ld + rd) / 2; // Average value of bottom sensors
int avl = (lt + ld) / 2; // Average value of left sensors
int avr = (rt + rd) / 2; // Average value of right sensors
int dvert = avt - avd; // Difference between top and bottom
int dhoriz = avl - avr; // Difference between left and right
if (abs(dvert) > tol) {
if (avt > avd) {
servovert = ++servovert;
if (servovert > servovertLimitHigh) servovert = servovertLimitHigh;
} else {
servovert = --servovert;
if (servovert < servovertLimitLow) servovert = servovertLimitLow;
}
vertical.write(servovert);
}
if (abs(dhoriz) > tol) {
if (avl > avr) {
servohori = --servohori;
if (servohori < servohoriLimitLow) servohori = servohoriLimitLow;
} else {
servohori = ++servohori;
if (servohori > servohoriLimitHigh) servohori = servohoriLimitHigh;
}
horizontal.write(servohori);
}
delay(dtime);
}
Servo horizontal; // Horizontal Servo Motor
int servohori = 180;
int servohoriLimitHigh = 175;
int servohoriLimitLow = 5;
Servo vertical; // Vertical Servo Motor
int servovert = 45;
int servovertLimitHigh = 100;
int servovertLimitLow = 1;
// LDR pin connections
int ldrlt = A0; // Bottom Left LDR
int ldrrt = A3; // Bottom Right LDR
int ldrld = A1; // Top Left LDR
int ldrrd = A2; // Top Right LDR
void setup() {
horizontal.attach(2);
vertical.attach(13);
horizontal.write(180);
vertical.write(45);
delay(2500);
}
void loop() {
int lt = analogRead(ldrlt); // Top left
int rt = analogRead(ldrrt); // Top right
int ld = analogRead(ldrld); // Bottom left
int rd = analogRead(ldrrd); // Bottom right
int dtime = 10;
int tol = 90; // Tolerance value for adjustment
int avt = (lt + rt) / 2; // Average value of top sensors
int avd = (ld + rd) / 2; // Average value of bottom sensors
int avl = (lt + ld) / 2; // Average value of left sensors
int avr = (rt + rd) / 2; // Average value of right sensors
int dvert = avt - avd; // Difference between top and bottom
int dhoriz = avl - avr; // Difference between left and right
if (abs(dvert) > tol) {
if (avt > avd) {
servovert = ++servovert;
if (servovert > servovertLimitHigh) servovert = servovertLimitHigh;
} else {
servovert = --servovert;
if (servovert < servovertLimitLow) servovert = servovertLimitLow;
}
vertical.write(servovert);
}
if (abs(dhoriz) > tol) {
if (avl > avr) {
servohori = --servohori;
if (servohori < servohoriLimitLow) servohori = servohoriLimitLow;
} else {
servohori = ++servohori;
if (servohori > servohoriLimitHigh) servohori = servohoriLimitHigh;
}
horizontal.write(servohori);
}
delay(dtime);
}
BThis the original code
BIt shows error
BI ve added the libraries too 
 A
Ayou must have fixed it, that compiles for me...
 J
JThings like..
JShould be written..
JMakes the comiler happier.

 G
GYes, for sure turn on warnings to "more" or "all" under file - preferences
It will catch many issues that compile but don't do what you expect
It will catch many issues that compile but don't do what you expect