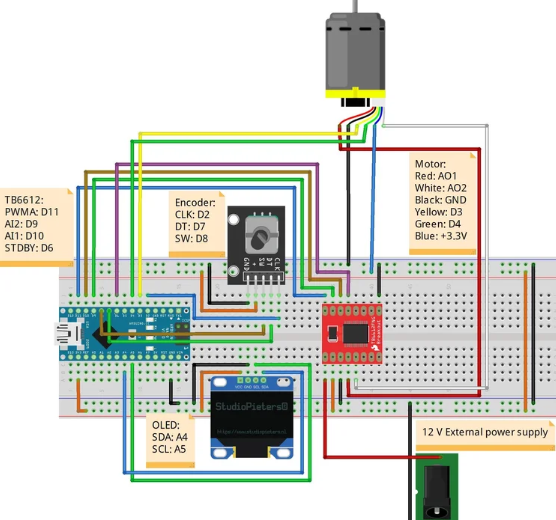
36SG-555 DC motor with magnetic encoder ; code issue pls Help
Hi, I did some new Modifications on the motor with the encoder , So I add the pid calculation and the attachInterrupt function
what i didn't understood it very will is the PID calculater , what I know is that the PID calculation (Proportional-Integral-Derivative ) is a mathematical formula used to control an output to do something , so Proportional calculate the error , and Integral-Derivative of the error
WHAT IS A PID CALCULATION ?
HOW WE CHOOSE KP KI AND KD ?
WHAT DOES MEAN A Proportional ?
WHAT DOES MEAN A Integral?
WHAT DOES MEAN A Derivative ?
what i didn't understood it very will is the PID calculater , what I know is that the PID calculation (Proportional-Integral-Derivative ) is a mathematical formula used to control an output to do something , so Proportional calculate the error , and Integral-Derivative of the error
WHAT IS A PID CALCULATION ?
HOW WE CHOOSE KP KI AND KD ?
WHAT DOES MEAN A Proportional ?
WHAT DOES MEAN A Integral?
WHAT DOES MEAN A Derivative ?
0encoder0code0.ino2.76KB