 S
S@@walmis I may have missed your reply but is there any consideration for this: a button to act as a limiter for axis excursion? So that when the button is depressed, the affected axes will only have a limited range mapped to the full stick excursion. Virpil implements this as a 'ceofficient of division -- basically scaling the raw output by a user specified amount.
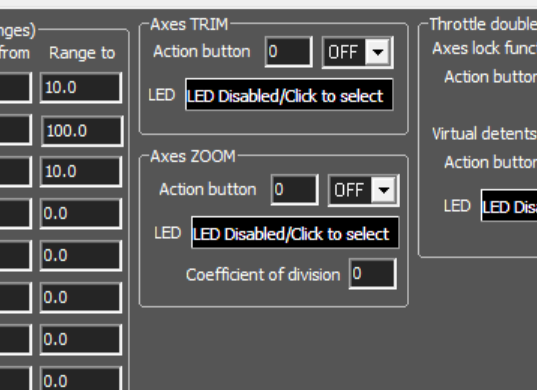
SThe dialog in the virpil software looks like this:
SThe relevant box is labeled 'axes zoom'. In the 'action button' field I enter the logical button I want to act as the modifier. In the coeffieicent of division I enter the 'scaling amount' for the axis I am adjusting. In the VP config software, this could be a 'box' in the 'settings tab' . Initially, it would be fine if it applied to all axes uniformly for simplicity.

 W
WThis is a bit tricky with FFB, since the center point is variable, but I guess could be doable with some maths. What's the main use case for this?
 W
WWhen it would be a good time to debug the F-18 grip?

 V
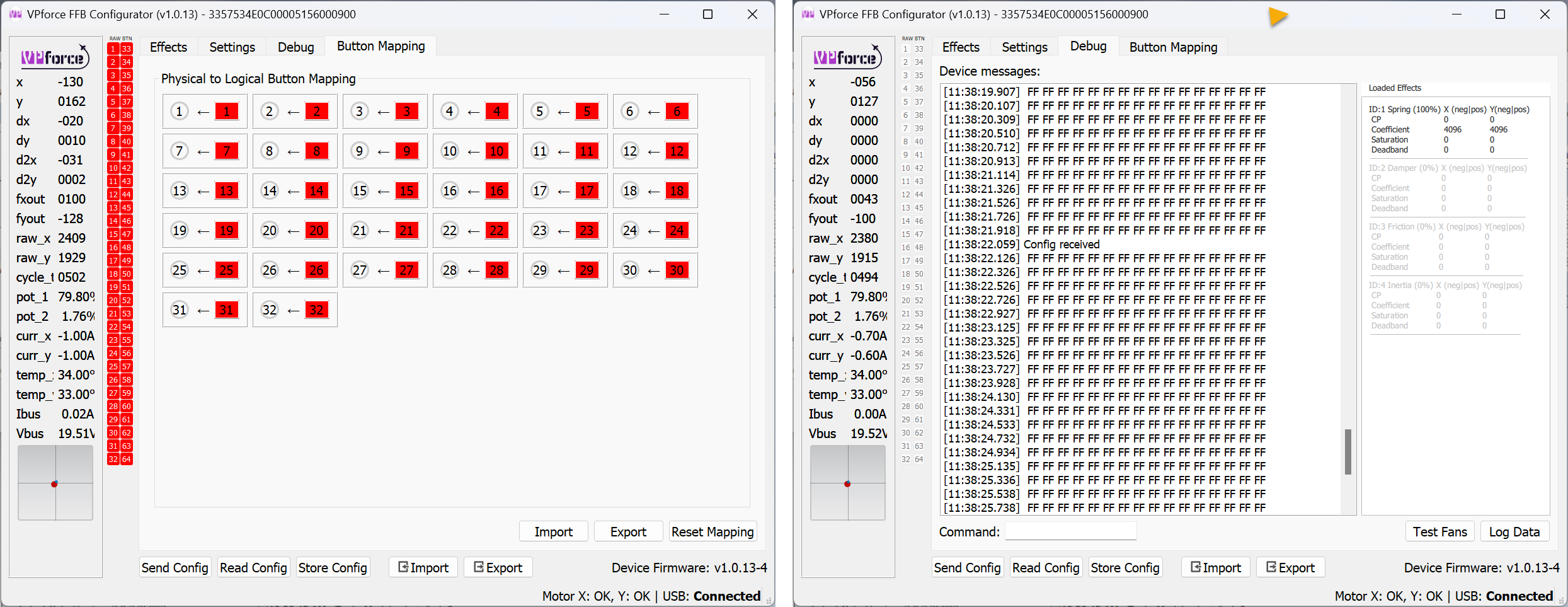
V[13:08:05.343] * USB Connected
[13:08:18.393] Config received
[13:08:18.394] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:18.592] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:18.794] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:18.995] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.196] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.397] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.597] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.799] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
and on
[13:08:18.393] Config received
[13:08:18.394] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:18.592] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:18.794] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:18.995] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.196] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.397] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.597] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
[13:08:19.799] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
and on
Whmm, should be a bit different
Wdoes it make a good connection with the Rhino?
Wpins not bent, etc?
VSure seems like it, no pins bent. I will retry
Wit should go something like "FF FF FF FF FF 80 00 80 00 80 00"
 A
Awill the 200mm extension on warbrd hit the desk mount? Why isnt it recomented?
A V
VReseated the connector twice, and also tried plugging in an extension thats easier to connect once, but all 3 times its just FF's
WHmm, curious case. I'll mail you a replacement, probably would be the best bet.
VOK, I'll hold off on the F16EX grip for now then, thanks!
 G
GI have a real dumb question.
GIf building a kit .. do the motors handle stick position as well? Or does there need to be a separate position / hall sensor systsem apart from the motors
GWatching the initial setup video definitely answers that. heh
GAnybody who's built the kit.. is PLA strong enough to print with? Or should the parts be made of another material

 R
RIf you mean the gimbal? PLA will last a few months, but will eventually fail (in many areas). I have just reprinted in PETG and it definitely seems like it will last much, much longer (if not forever).
GExcellent. Thanks.
 H
HIs there a 3D printed box for the base instead of doing it out of wood or sheet metal??
 H
HDisregard, I found Walmis .step files for the 8mm ply. This can be tried with a 3D print as well.
GThose of you who built the kit... what should I use for a power supply?
 S
S350.4W 24V 14.6A Single Output Switchable Power Supply 24 Volts 14.6 Amps Features • AC input range selectable by a switch • Withstand 300 VAC surge input for 5 seconds • No load power consumption • 1U low profile • High operating temperature, up to 70°C • Protections: Short circuit / Overload / ...
 G
G G
GGot everything coming together slowly. Can't wait
 Y
YSlowly is the word. That will make it taste that much better, right?
Yat least that's my hope 
 A
AThe !info command appears to not give a response anymore btw
A(At least for my email)
 F
FWorking for me
 W
WFixed!
 S
SHaving what I hope is a stupid me issue, but my TM Warthog grip seems to only register the trigger and it lights up everything in the VPForce software. Yes, I've verified it's plugged in correctly (tried both extension cable, and directly to the grip) and verified the buttons work by plugging it back into it's old base. I ran the debugging profile too and it just spammed the FF line with button trigger presses showing 00 00 repeating. This is NOT using the passthrough port you installed, was trying to just use the native interface. I also tried power cycling/unplugging USB. Everything else seems fine and during a test flight the base functioned as expected.
 S
SShort logfile capture if relevant.
samples.csv1.61MB
 W
WWe figured out that the USB voltage on the hub was too high - 5.6V, hence the grip didn't register the 3.3V signaling correctly. When plugged directly into PC it works correctly.
STo build on this, I believe this hub was previously faulty its not an issue with the Rhino or hubs in general. I was just running out of shit to plug shit into.
 P
PIf anyone can help out with the install process for the DCS Telemetry app that'd be cool. I have python installed & the .zip file downloaded from Walmis's github but I'm lost as to what to do with the cmd prompt stuff, I'll be online for a while if anyone is keen to help? Cheers
W- open up windows explorer, navigate to the source files.
- Hold shift and right click on a blank area
- Click
open powershell here - enter
pip3 install -r requirements.txtin powershell prompt - and then
python main.py
P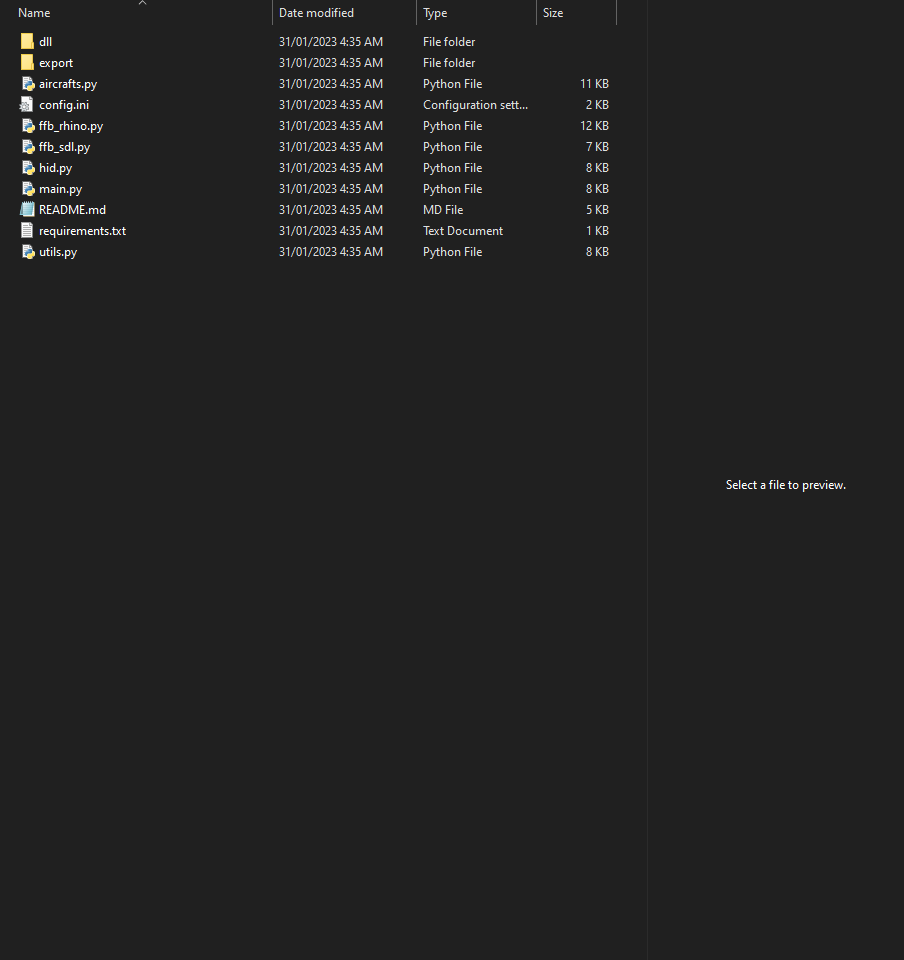 P
Pright clicking in this window & typing in the powershell window "pip3 install -r requirements.txt" gives me an error
P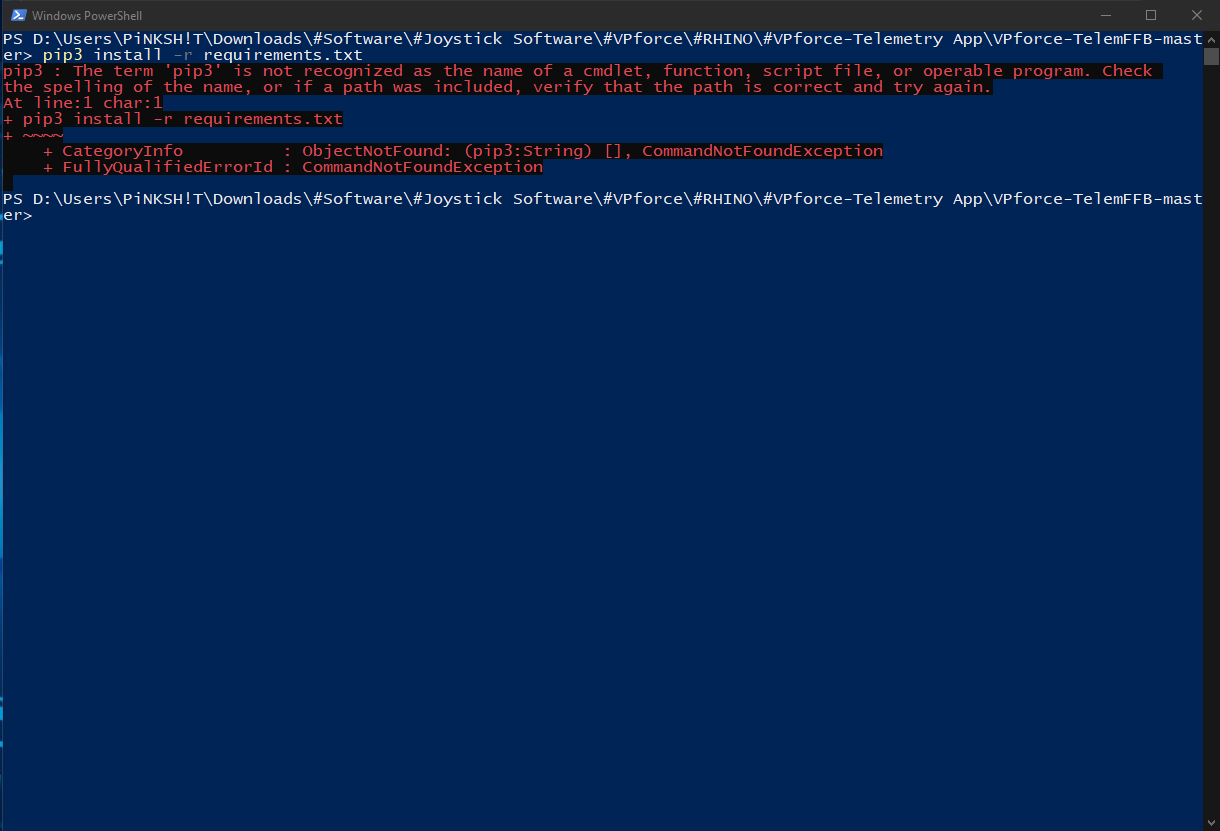 W
Wtry pip instead of pip3
Pok
Palright, looks like for some reason the installer for python that I got from their site didn't install correctly for this to work, instead I did what Skypickle told me to do in cmd type python & it lead me to windows store, once I did the python install again through the store this time the commands you gave me worked
 D
DI haven't read everything but, would it not be possible to add the base in the simshaker software?
It would be easier then to make profil with different effect
It would be easier then to make profil with different effect
 W
WNo, it's not that simple
POk Walmis what next? Do I put the export .lua file just in the DCS.openbeta folder? or is it in a specific folder?
DBecause of them not wanting you to do it or because of the way the effect is generated being different