FWIW, I am working with an XIAO nRF52840 Sense which has an IMU onboard. However, my question is mostly conceptual. Basically how do you combine the inputs from more than one axis to determine the actual orientation of your device?
For instance, if the Z axis is pointing down here, and you rotate it about the X axis, you know the intensity of Z changes, but you don't know which way it has rotated about the X axis. You'd need to also use Y axis readings. Is there an elegant way to combine these two readings to determine it's actual orientation?
 A
A C
C

 S
S
 S
S A
A M
M T
T P
P
 M
M J
J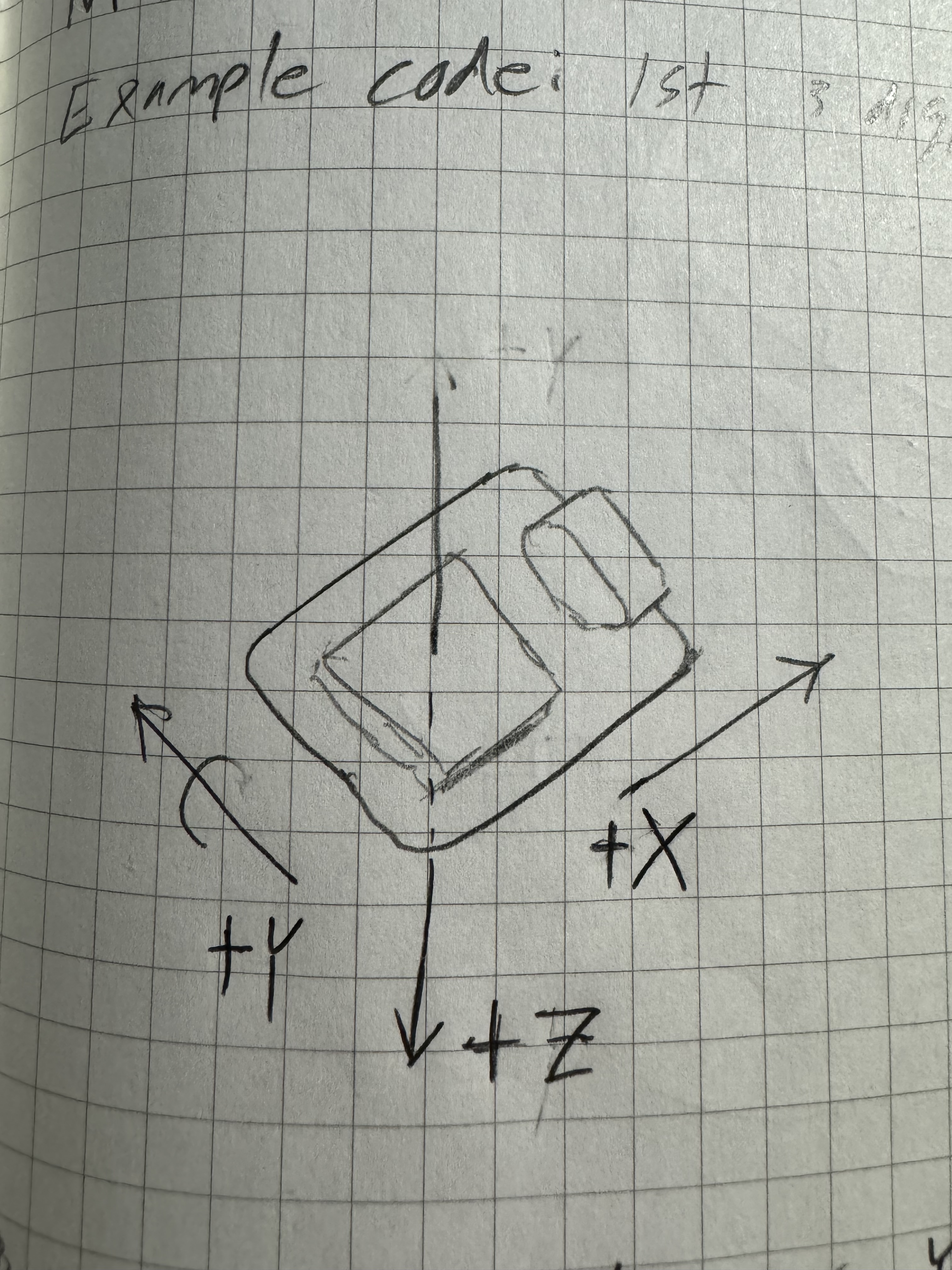
 K
K

 N
N
 Y
Y N
N W
W @kmulier
@kmulier @kmulier
@kmulier






