There's an important concept to understand about force feedback: When set to 100% force, the resista
There's an important concept to understand about force feedback: When set to 100% force, the resistance is distributed across the entire range of motion - the motors only reach maximum output when the stick is fully deflected, meaning there's no saturation point.
If we increase this to 300% for a stiffer feel, the motors will reach 100% output at just one-third of the stick's travel. This creates what we can call a "dynamic range" limitation. The game sends a "set spring gain to 100%" command at relatively low airspeeds, reaching maximum stiffness early without further increases.
Most DCS modules (with the exception of the F-4 Phantom) don't provide adjustments for this behavior, so we'll need to rely on external implementations to create realistic force-versus-airspeed relationships.
The key limitation: once the force gradient saturates, the stick won't produce additional resistance beyond that point since the motors are already operating at maximum power earlier in the range of motion. This effectively reduces the stick's ability to communicate different force levels through the full range of travel.
Additional points:
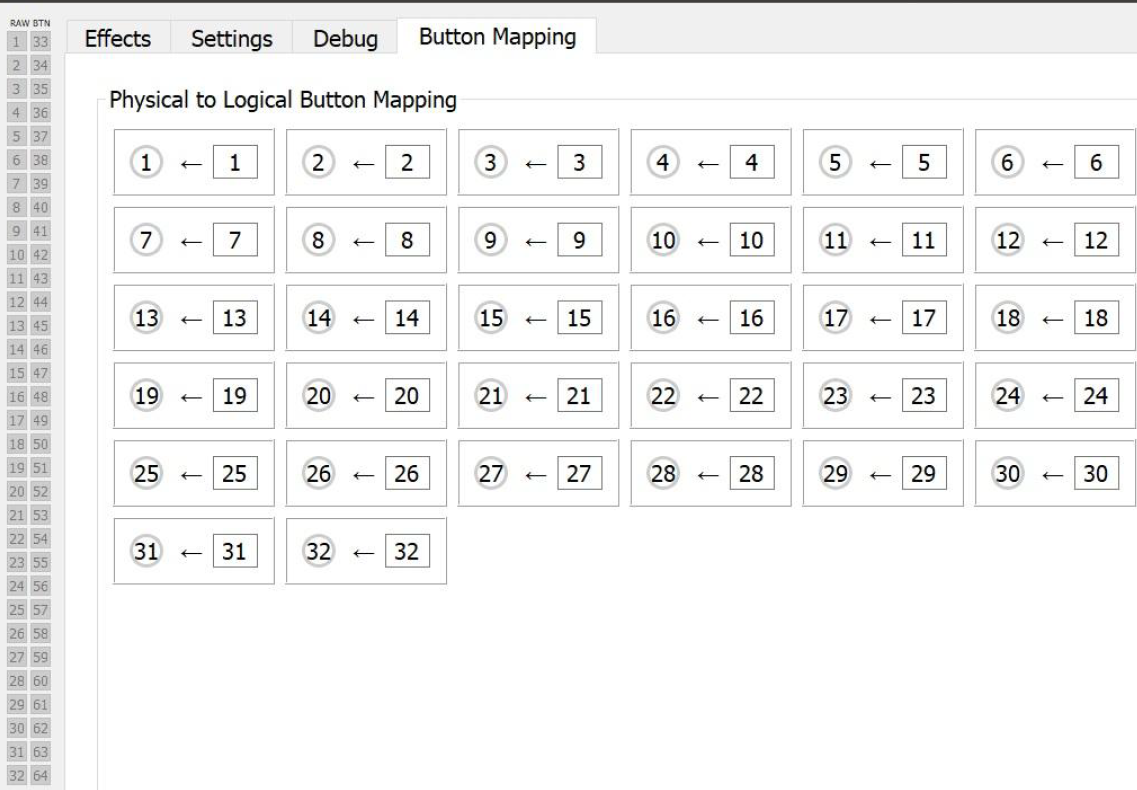
The Rhino operates within the standard 100% range by default. However, you can boost this using the spring gain mapping tool, which offers two approaches:
* Remapping spring strength versus displacement to achieve higher overall gain
* Remapping the game's percent gain to a custom response curve
Be aware that higher spring gains make the system less stable, making proper damper and LPF (Low Pass Filter) settings more critical:
* If gain is too high, the stick will vibrate rapidly ("brrrrrt") and trigger a "FAULT_UNSTABLE" error
* If damping is too low, the stick will oscillate back and forth without finding a stable position
Later telemFFB have the feature to set our own force vs airspeed curve
If we increase this to 300% for a stiffer feel, the motors will reach 100% output at just one-third of the stick's travel. This creates what we can call a "dynamic range" limitation. The game sends a "set spring gain to 100%" command at relatively low airspeeds, reaching maximum stiffness early without further increases.
Most DCS modules (with the exception of the F-4 Phantom) don't provide adjustments for this behavior, so we'll need to rely on external implementations to create realistic force-versus-airspeed relationships.
The key limitation: once the force gradient saturates, the stick won't produce additional resistance beyond that point since the motors are already operating at maximum power earlier in the range of motion. This effectively reduces the stick's ability to communicate different force levels through the full range of travel.
Additional points:
The Rhino operates within the standard 100% range by default. However, you can boost this using the spring gain mapping tool, which offers two approaches:
* Remapping spring strength versus displacement to achieve higher overall gain
* Remapping the game's percent gain to a custom response curve
Be aware that higher spring gains make the system less stable, making proper damper and LPF (Low Pass Filter) settings more critical:
* If gain is too high, the stick will vibrate rapidly ("brrrrrt") and trigger a "FAULT_UNSTABLE" error
* If damping is too low, the stick will oscillate back and forth without finding a stable position
Later telemFFB have the feature to set our own force vs airspeed curve