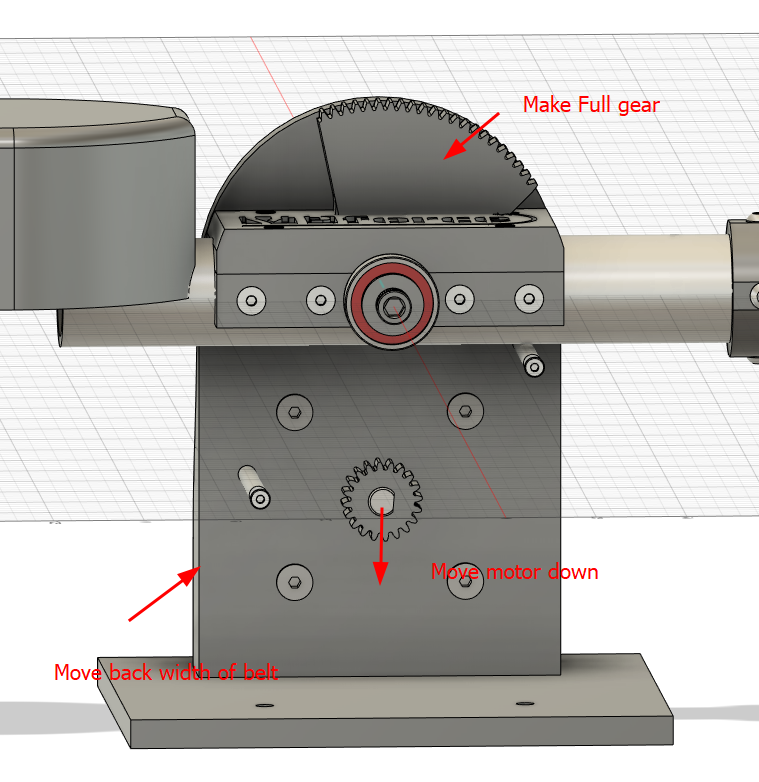
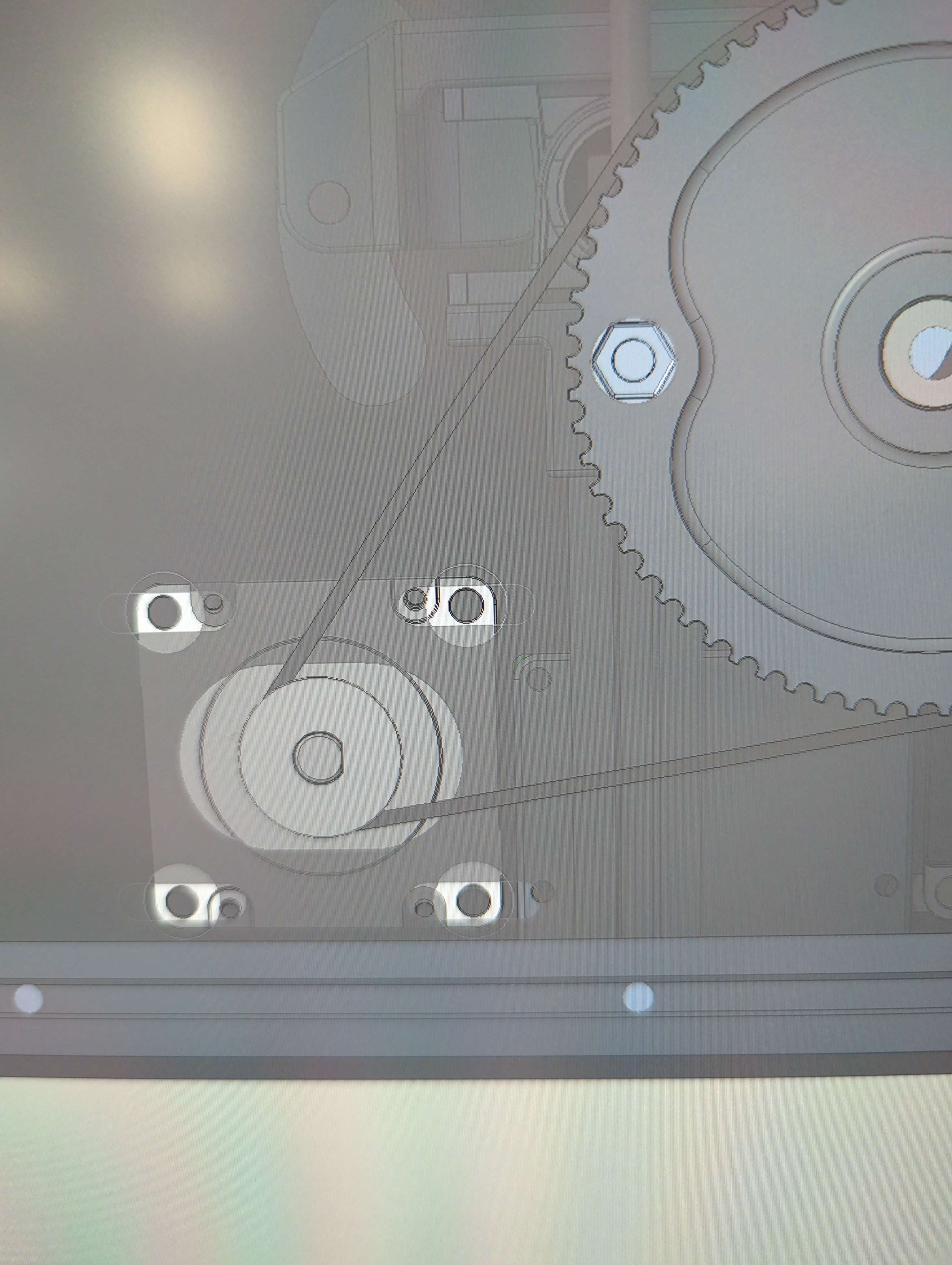
As I started thinking about the design, the direct gear drive was one of my primary concerns. It's
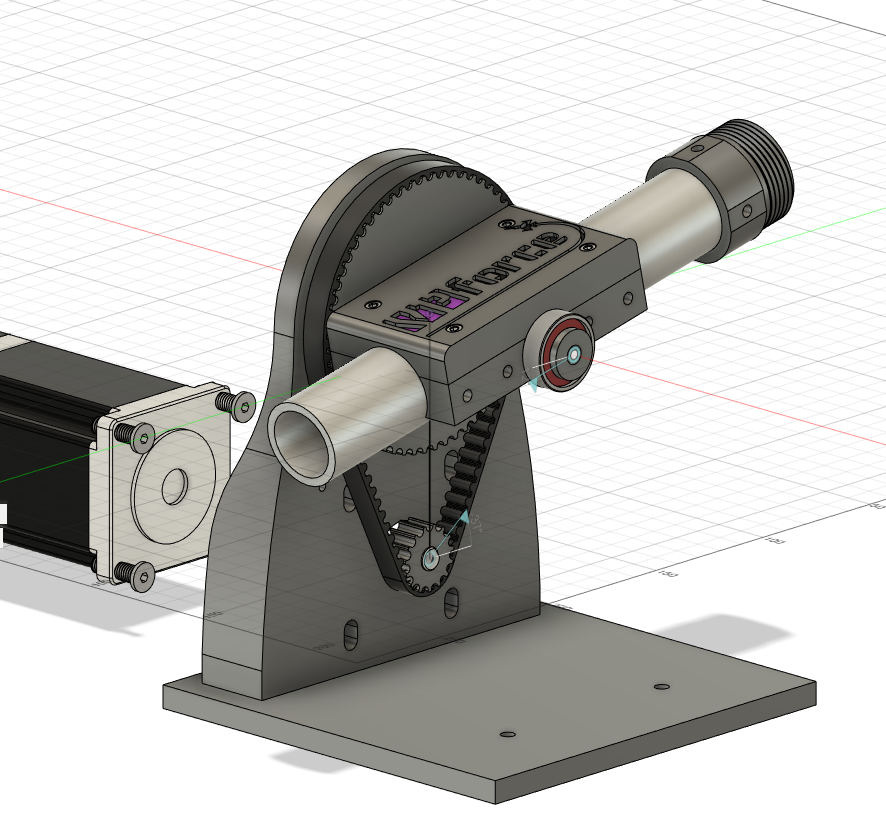
As I started thinking about the design, the direct gear drive was one of my primary concerns. It's how it is in my currently in my production collective, however the main gear is just driving a smaller gear attached to a rotary damper which contains the magnet being read for the axis.
The precision is fine, but you can "feel" the gears through the handle. A lot of that though is because the geometry isn't quite perfect. The main parts on that unit are all referenced from imports from the original design. Which I found out as I set out to build the FFB design, are every so slightly off.
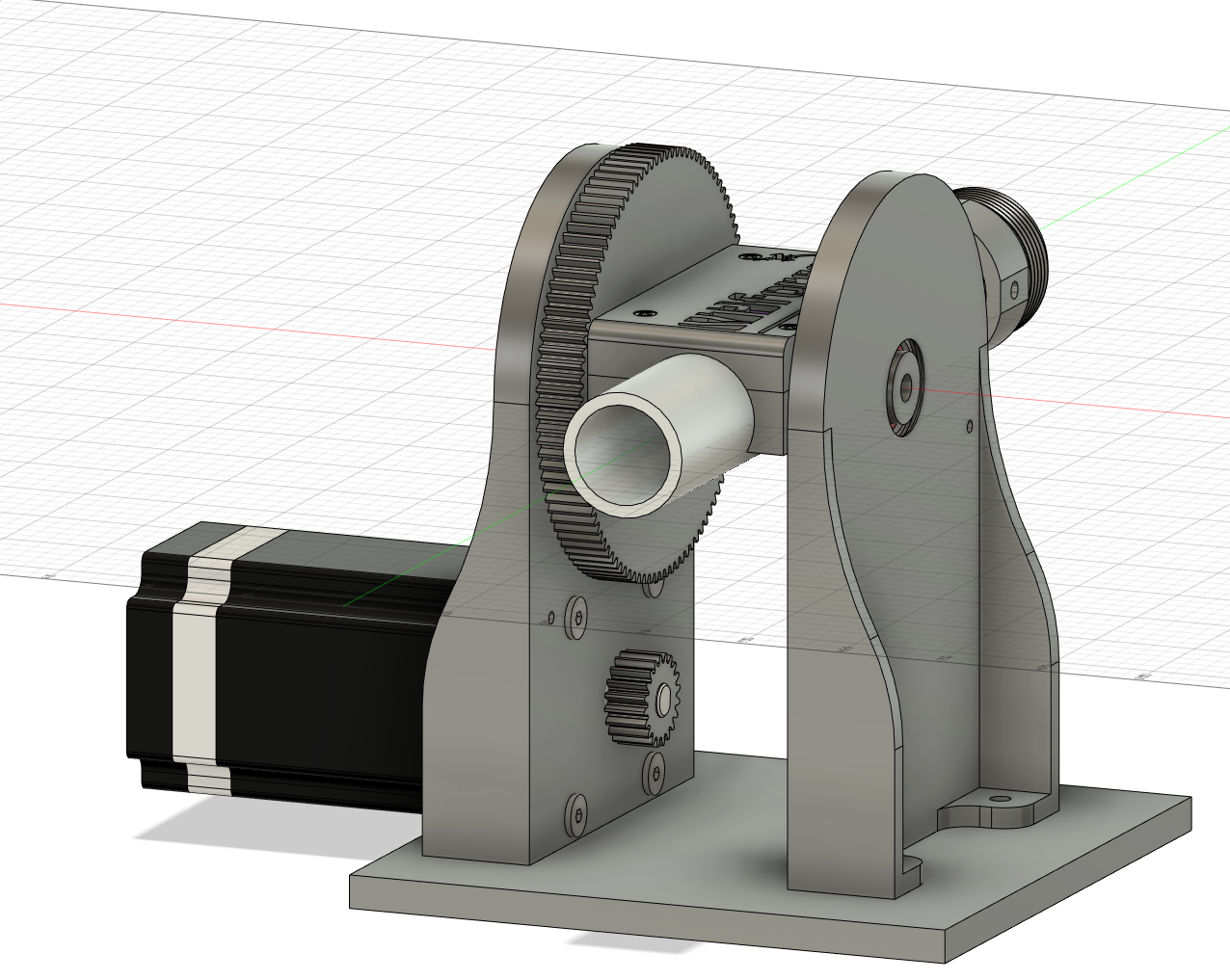
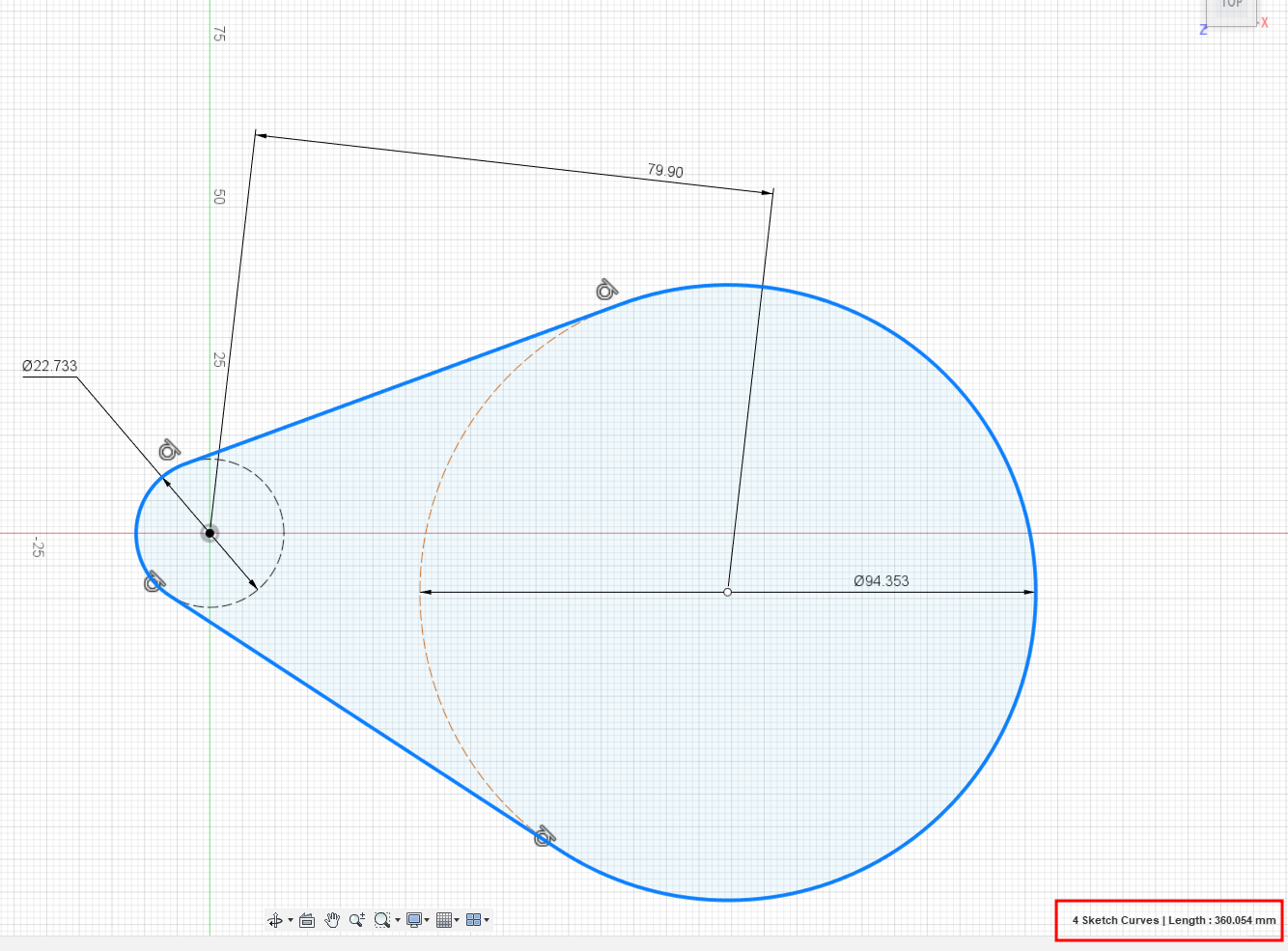
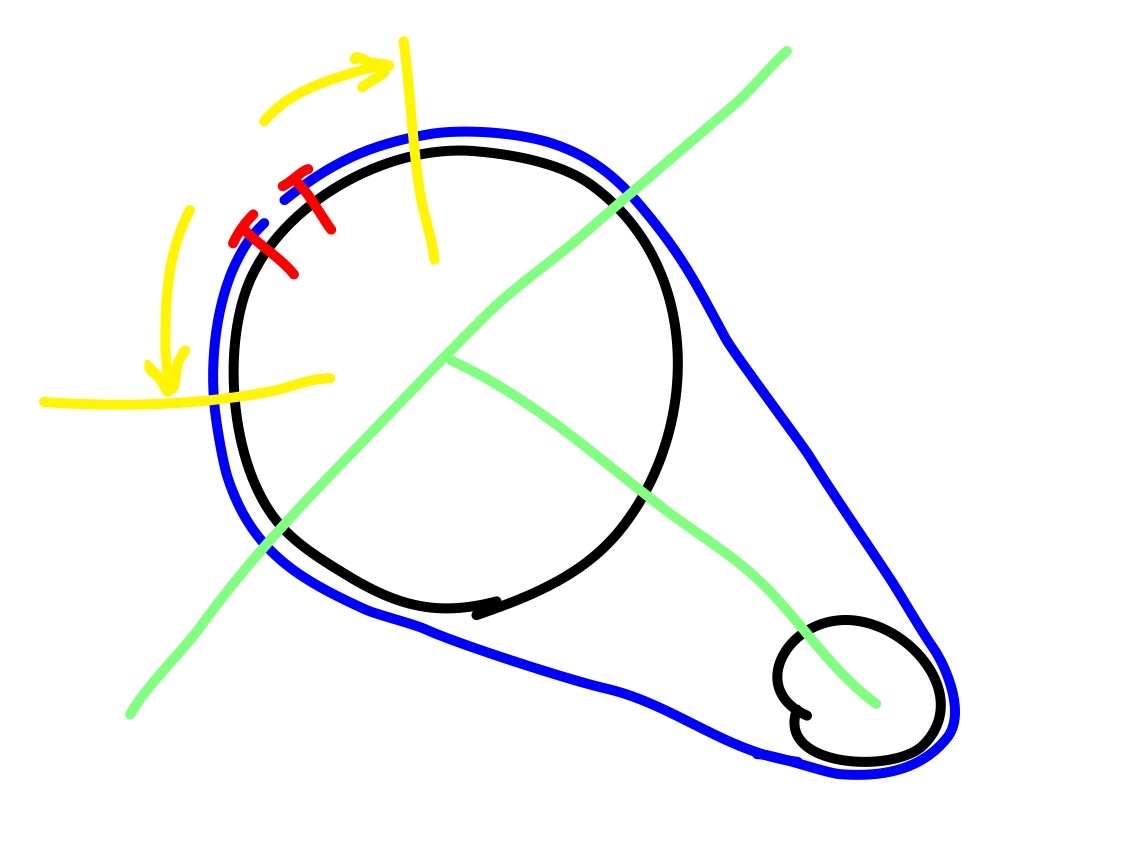
I sat and looked at my current design for a good while, thinking about how I could incorporate a pully driven system, but couldn't think of a good way without making the whole contraption significantly larger, or more complex.
But that was before I ended up just re-designing all the parts, as opposed to modifying and referencing my existing design. Now that I am looking at this again after reading your comment, I think this might be possible...
The precision is fine, but you can "feel" the gears through the handle. A lot of that though is because the geometry isn't quite perfect. The main parts on that unit are all referenced from imports from the original design. Which I found out as I set out to build the FFB design, are every so slightly off.
I sat and looked at my current design for a good while, thinking about how I could incorporate a pully driven system, but couldn't think of a good way without making the whole contraption significantly larger, or more complex.
But that was before I ended up just re-designing all the parts, as opposed to modifying and referencing my existing design. Now that I am looking at this again after reading your comment, I think this might be possible...