Ok so as promised here is a short write up on the SimFab DCS edition with a custom rhino mount Dimitar put together for me. I will focus on the Rhino integration because there is probably a lot of info on the rest of the SimFab setup. I will say though that all of the mounting solutions and tools were well organized and everything came together solidly, I am very happy with it so far. The hardest part was getting the seat back on to the seat lol.
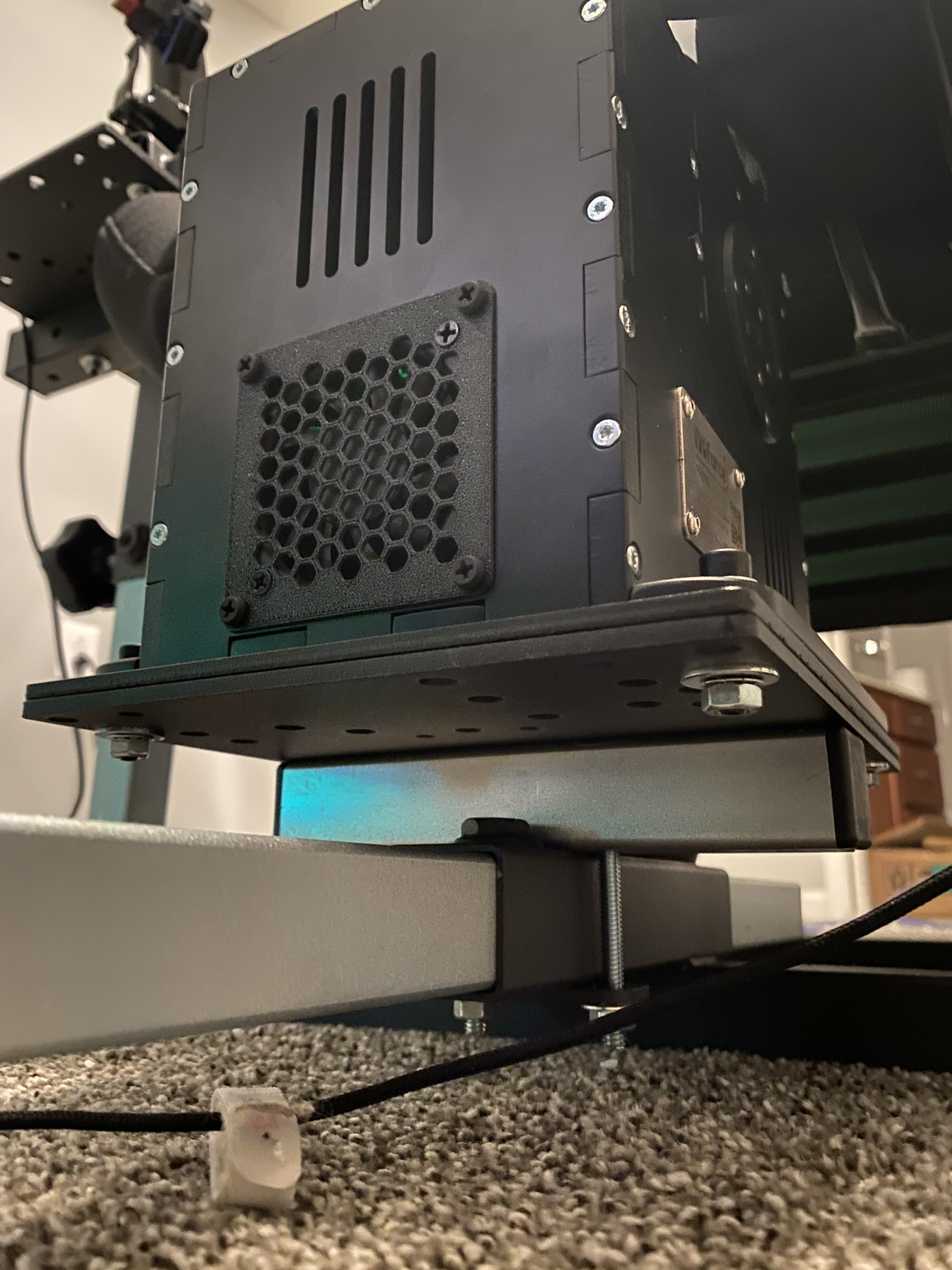
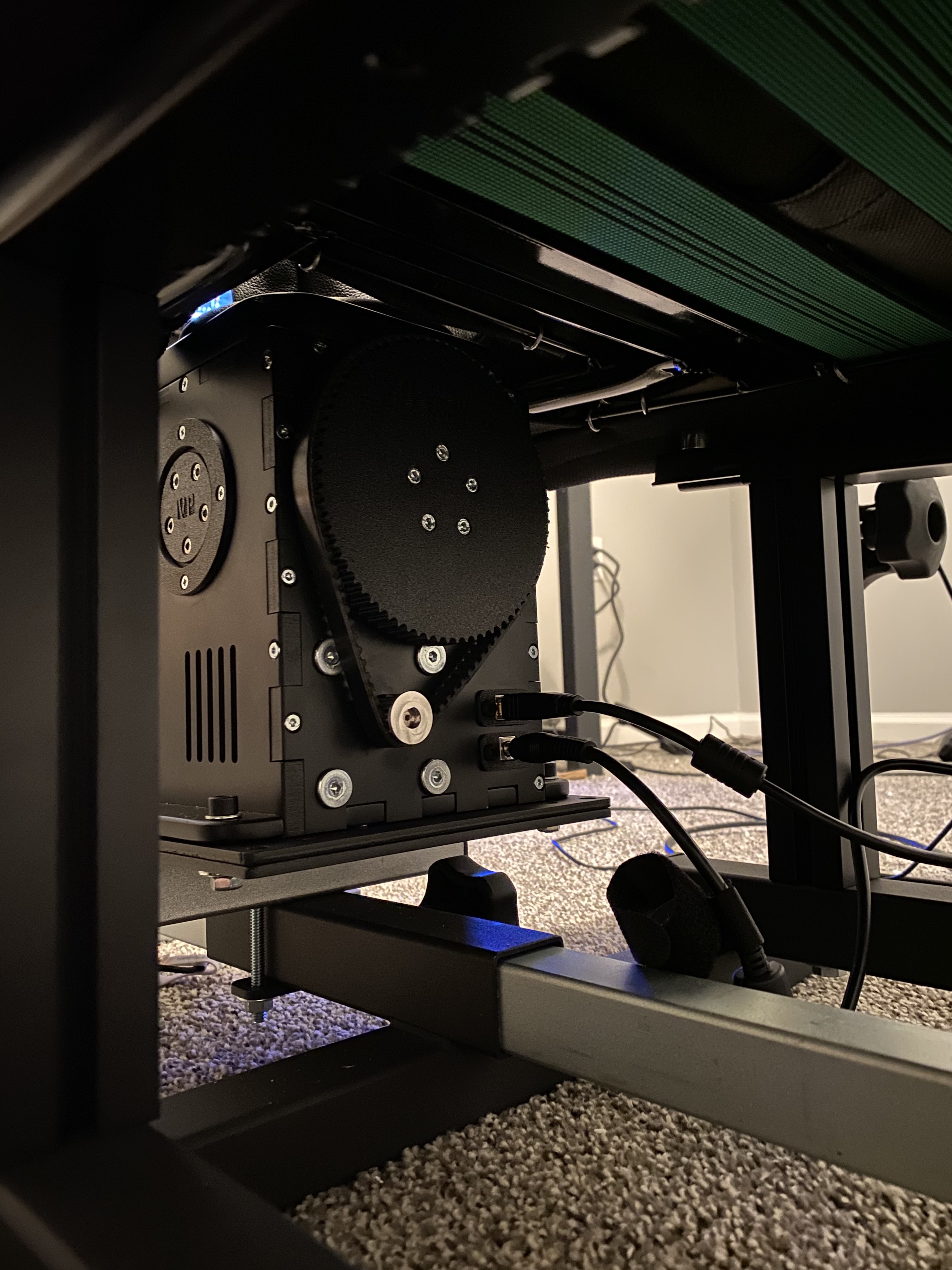
As for the Rhino integration, Dimitar supplied me with a spacer and doubled up plates to be clamped on to the rudder tube part of the seat frame. This so far has worked perfectly, idk if he’s a genius or very lucky, but all the dimensions of how the rhino fits with this solution are super tight, the seat adjuster is barely not touching it, the standard stick travel is jussstt beginning to touch the cushions on the limits inside the seat cutout, and the pulley of the flipped Rhino base just clears the bottom of the seat. It is also trivial to access the cable connections in the large space under the seat with the installed risers.
The length of the Rhino with a direct mounted TM Warthog grip was too low to be comfortable in this setup, however, my Virpil T50CM2 grip that finally arrived alleviated the issue pretty much completely, since the height from the mount to the bottom of the palm rest (which is adjustable) is much longer than the TM Warthog. This brought it up to a much more usable height, and I think it’s pretty close to optimal, maybe a bit higher would be nice. Only issue with my setup is that I kind of run into my right thigh with the T50s palm rest when going hard right roll, but that is likely due to me putting the right side mount grip over the seat, I can just adjust it out and likely have no issue at all.
Feel free to DM or @ me with any questions or if you need any measurements taken or pictures for your own reference. Thank you to @MashedPotato for sending me some pics of his setup during my decision process. Here is a picture dump of my setup trying to show what I explained above: