thing is, if there's no info coming back from the sim about when exactly the brakes are engaging or how much brake force is being applied in the sim, the ffb on the axes is kind of useless. It wouldn't be helpful beyond just making the brakes "feel" better.
I see two problems here. 1.) Our calfs/feet are pretty strong. It would be nigh physically impossible to get motors and/or gear reduction on the brake axes that were strong enough to produce even remotely convincing results. 2.) Lack of telemetry. Given what I know about telemetry from the various sims I would put them in this order:
telemetry is the big one for sure. the feedback doesn't have to be real world convincing. It just needs to tell you that the brakes are engaged and applying force or they aren't. As long as it's enough feedback to feel the actual engagement point, it would be enough. Taxiing warbirds is a PITA right now, or engaging the brakes unevenly after landing and suddenly veering towards one side of the runway.
Ive said before that I've thought about buying some different rubber balls/tennis balls/racquet balls to see if I can shove one of them in the hinge point of my Virpil pedals to see if I can get a more progressive brake feeling than that standard linear springs
that is, by far, the biggest benefit, and worth every penny in its own rite IMHO. You also get dynamic forces with non-FBW aircraft, trim following and of course all of the other auxiliary effects too.
But then you would lose the ability to adjust FFB effects with a pot, right? Or can another board (I.e. the stick’s board) control effect strength globally?
Those sensors are almost certainly just a digital in/out. The connector in that case would likely just need to be swapped out to match the new style connector to tie in to the rhino pedal board
Yeah, I get that if you just use the pedals' control board, the brake signals would do what they had always done. I was asking about using the two analog inputs on the VPForce USB board for brakes.
As long as whatever sensor you're using is analogue, sure. Those sensor input points are just looking for a measurable shift in electrical signal (like a pot). If you want to do something more complex, you'd need to setup a shift register or breakout board, and code it to emulate a joystick that the Rhino board can run
:). I get that too. My specific question was asking whether one could use the pot input on another VPForce board to globally apply FFB effects strength across two or more VPForce boards. So if I used the two analog inputs on my FFB pedals for brake signals, could I use the pot on my stick VPForce board to adjust force strength on the pedals.
Like via a hardware link? You could wire the pot to both boards via mutual connections as long as the pot has the throughput to send signal to both. That would be a super annoying wiring setup though. In software, that should be pretty easy though
Just a quick, general question. I have a TM F-18 grip in the Rhino…. It feels like something is loose in the grip itself, near the base the grip has a tiny, clicking movement. It is not noticeable when going side to sides only fore and aft, right near where the twist collar is. Anyone know how I should tighten it up?
Remove the grip, and repeat the motions with it disconnected, see if anything moves that shouldn't. There's not a lot going on in the base area. Maybe the grounding screw came loose? You can crack the shell and see if anything is loose in it. The TM hornet is much more forgiving than the viper as far as springs and stuff flying out at you
I went from 36th to 6th today after I paid my invoice. This is just after I went from like 80 something to 40 something. Is that just all the people who passed up their reservation?
It's pretty common on Warthog/Cougar for the tailstock to get a little loose. One of the screws is accessible from outside but the other is inside so it needs to be opened up to tighten it and I can see they carried this design over to the F18 grip.
 C
C N
N T
T S
S
 M
M A
A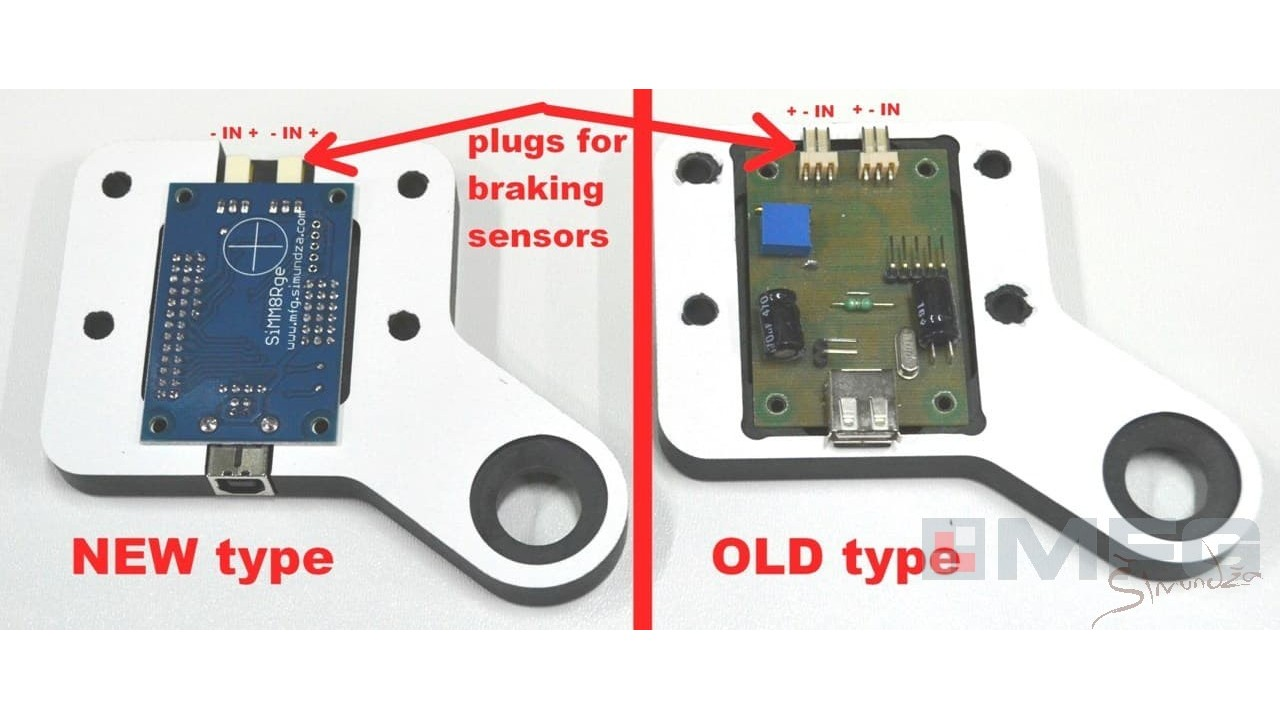
 W
W T
T
 S
S
 D
D P
P I
I M
M S
S M
M
 B
B
 S
S






