Isit possible to rotate the connector 180deg? I unscrewed the screws but don’t want to tug on the pi
Isit possible to rotate the connector 180deg? I unscrewed the screws but don’t want to tug on the piece too hard. It’s not coming out easily.

 O
O W
W NWNNNNNN
NWNNNNNN F
F GNGW
GNGW L
L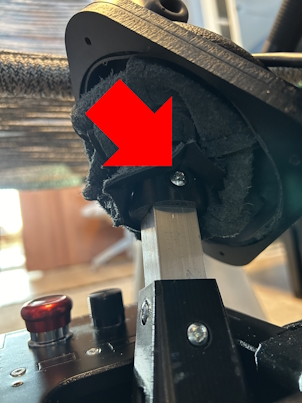 NNNLW
NNNLW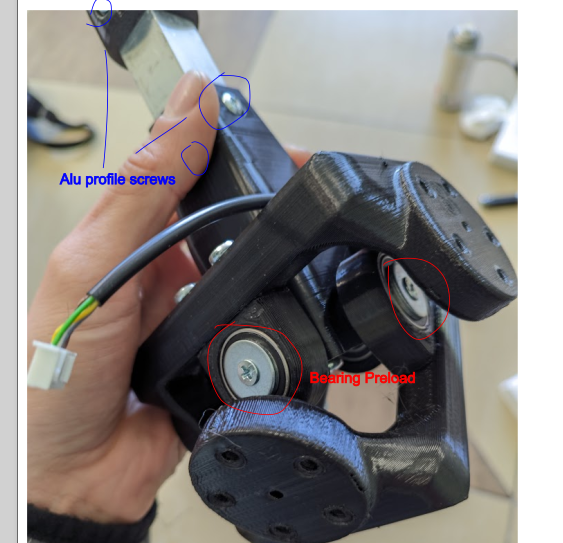 LN
LN W
W
 G
G N
N F
F
 VWV
VWV AAV
AAV PP
PP OPOV
OPOV Thanks for pointing me in right directionA
Thanks for pointing me in right directionA AO
AO PNPPP
PNPPP LV
LV








