 G
GWas using the stick this morning all fine, just plugged it back in and now totally dead. Checked the PSU which is outputting 19v fine, but stick itself is dead, windows also doesn't recognise it being plugged in anymore.
Anything I can check, I'm pretty ok with electronics? Didn't want to go digging in straight away.
Anything I can check, I'm pretty ok with electronics? Didn't want to go digging in straight away.
GLittle more checking, I get the beeps out of the base as I plug in the USB, but as above windows isn't seeing it and the joystick itself is limp like the stop button is pressed in.
 W
WBeeping indicates that the mainboard is still working. Do the motors anti cogging work when you plug in the power?
Is it connected to the mainboard or via hub?
Is it connected to the mainboard or via hub?
 W
WLooks like base communicates with the adapter OK, maybe your grip connector is not fully inserted?
 G
GI assume you mean by anti cogging that it's smooth rather than the feeling of bumps as you move the stick? if so then yes thats working.
It was through a hub but have tried it directly with the same results
It was through a hub but have tried it directly with the same results
 W
WProbably a good idea to try a different usb cable if you haven't done so already, before digging any deeper 
GWas just in the process of doing that and yep, somehow the cable is faulty....... Oh well catastophy averted
 P
POK, I reconnect the adapter with the stick and report back
Pok I will realign the arrow
 B
Btoo exited to re read everything , but will start .....
Just built a DIY Rhino finished about an hour ago , all working in VPC mounted VKB via adaptor , joystick buttons all working , played with the TelemFFB configuration files and it updated the IL2 start up file BUT .... i start IL2 , i go to settings , it sees JOYSTICK 10 as the Rhino , and by moving the stick it records roll as X , pitch as Y , but when i try and fly i get no response on either axis in the plane . Tried a reboot , restarting game and stick , and ideas ,
Just built a DIY Rhino finished about an hour ago , all working in VPC mounted VKB via adaptor , joystick buttons all working , played with the TelemFFB configuration files and it updated the IL2 start up file BUT .... i start IL2 , i go to settings , it sees JOYSTICK 10 as the Rhino , and by moving the stick it records roll as X , pitch as Y , but when i try and fly i get no response on either axis in the plane . Tried a reboot , restarting game and stick , and ideas ,
BDevice Firmware: v1.0.16

 N
NI know IL2 has issues when too many USB devices are connected.. that can manifest in different ways. Sounds like you have a lot of devices (joystick 10). Try disconnecting some thing or two and see if it registers while in the aircraft. Some folks also use HID Hide.
Also make sure you explicitly enable FFB in the IL2 input device settings, though this won't cause what you are seeing
Lastly, you mention TelemFFB config files.. you're probably using the "stable release" version... you'll want to grab the release version as it is much more feature rich (and no pesky text config files). Check the pinned messages in #VPforce-TelemFFB for a link to the downloads page.
Also make sure you explicitly enable FFB in the IL2 input device settings, though this won't cause what you are seeing
Lastly, you mention TelemFFB config files.. you're probably using the "stable release" version... you'll want to grab the release version as it is much more feature rich (and no pesky text config files). Check the pinned messages in #VPforce-TelemFFB for a link to the downloads page.
Bthanks , i did wonder about the Joystick 10 issue , i have a few that i would like to keep
1- VKB stick
And yes i have stable Telem FFB , will latest release
1- VKB stick
- Slaw Pedals
3 Throttle 1
4 Throttle 2
5&6 2x button boxes
7 The RHINO
And yes i have stable Telem FFB , will latest release
NYou don't need or want to do anything in the windows usb controller, all calibration and any necessecary axis inversions should be done through the configurator.
I can't really give you any further tips on the (potential) HID device count issue. I've never run into the issue myself, but I know many have. A lot of people end up using HidHide (https://github.com/nefarius/HidHide) to mask certain peripherals that are not needed from being seein by IL2 so they don't have to disconnect anything.
I'd test the theory out before going down that path though. Disconnect a couple devices and try IL2 again and see if it sees the Rhino device properly during flight.
I can't really give you any further tips on the (potential) HID device count issue. I've never run into the issue myself, but I know many have. A lot of people end up using HidHide (https://github.com/nefarius/HidHide) to mask certain peripherals that are not needed from being seein by IL2 so they don't have to disconnect anything.
I'd test the theory out before going down that path though. Disconnect a couple devices and try IL2 again and see if it sees the Rhino device properly during flight.
 L
LAfter 1-2min of intense flying, like dogfight, fan starting. I suppose it's for cooling down motors. But is it normal the motors getting warm that quick? Power knob is set on about 50-60%.
 A
AI'm not sure but sounds pretty quick for 50-60%
 B
BThanks,I think i ve totally screwed up IL2 and controller setting as no longer even sees the rhino, i m going to reinstall IL2 then plug in only a few controllers and take it from there. Other than VPC is there any other way of checking all is working ok , from a windows / software perspective? Other sims i have but not tested are MSFS and DCS
AI suggest trying to reduce the number of controllers before reinstalling
AIl-2 controller setup is really funky stuff
LWhat's the correct temp?
AI don't know if there is a correct temp as such, it just sounds like pretty fast heating for 50-60% power
 S
Sanother trick might be to use joystick gremlin and combine your pedals and switch boxes into a single "device" and then hidhide the real ones
 K
KHow do I reimport that file into configurator? I can see it in the configs folder
 T
TOpen configurator, click 'Import' browse to folder, select.
TMake your changes, click 'Apply' test, make changes 'Apply" etc, then Store (save)
 P
PI started getting this issue, where the stick doesn't seem to be able to start. I get this sound effect of it starting up and then shutting down
I originally had the cable go through a hub, it worked fine, and then stopped doing so. I've tried direct to my computer and get the same issue regardless
I originally had the cable go through a hub, it worked fine, and then stopped doing so. I've tried direct to my computer and get the same issue regardless
 W
WThis sound is when motors are not receiving power
WTry opening the VP configurator app and see what's the status
PI double checked, but the ac adaptor is plugged in as well as I can make it. The application itself shows the USB to be disconnected, with both motors offline
PI was starting to get an issue yesterday where the stick was randomly connecting/disconnecting
P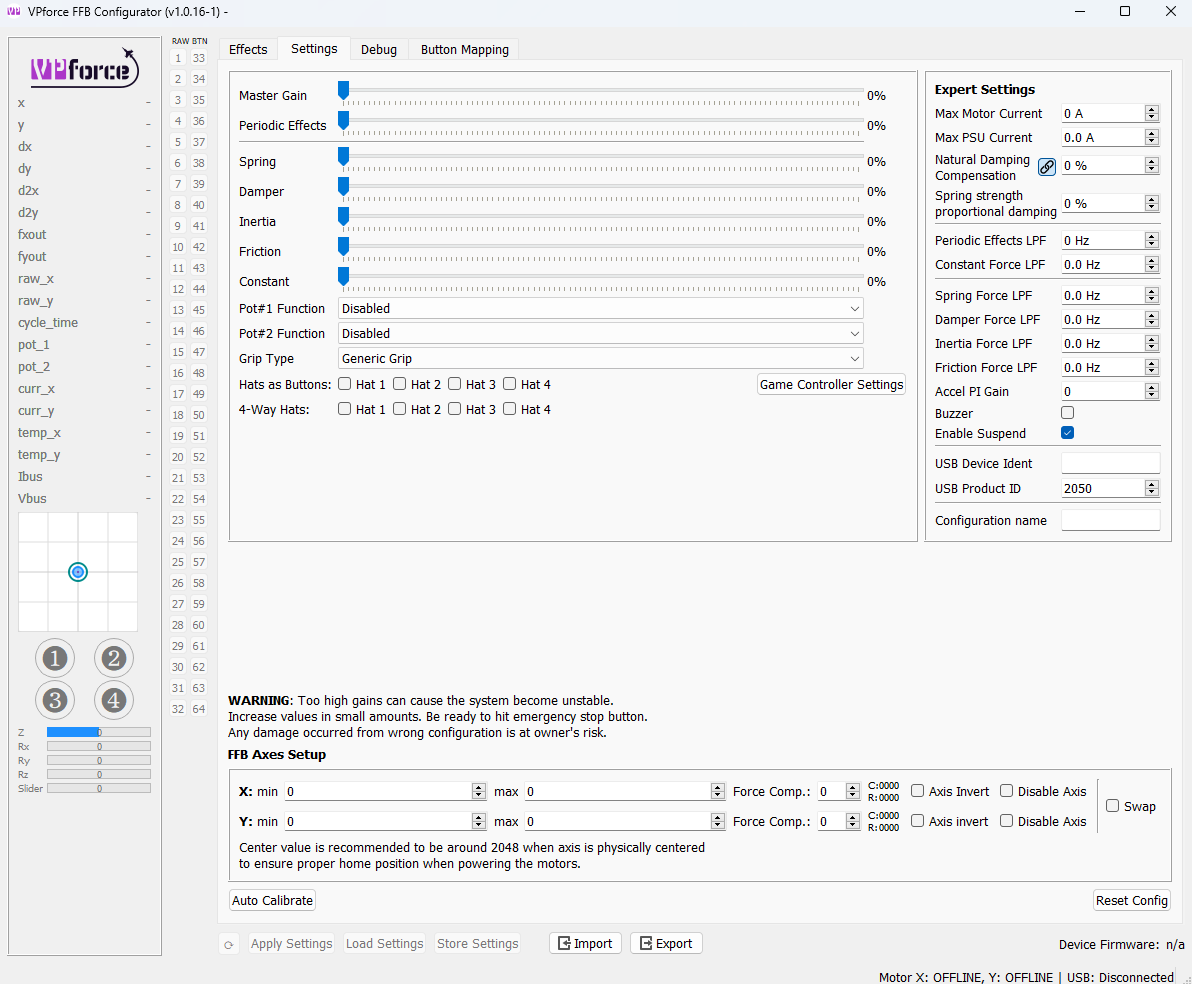 W
WHmm, try maybe another cable
PI don't have another usb cable of this sort to my knowledge?
WYesterday was a similar issue, starting to wonder if there's a bad batch of USB cables
PWyeah, it's a common printer cable
WAlso some other things to try: reboot, plug into the back connector of the PC
POK I'll order a new one. Just a bit annoyed this occurred a week into getting the base. Yeah I've already tried that method I'm afraid
 S
SAre there any plans to update the VKB adaptor for rev C grips. I’m not even sure you can buy grips with rev B connectors anymore.
Bil2
 G
GJust want to verify: The VKB adaptor fits the MKIII grips and not the MKIV?
 W
WYeah
GThanks!
Bi am really struggling to get the DIY build working, from a software standpoint , i posted about IL2 but disregard that as it may be an excess controller issue that i need to delve into further. I thought i would try DCS , so i v red then reread the manual , i m just looking for simple FFB and axis assigment to prove my stick works . Whree i ve got to
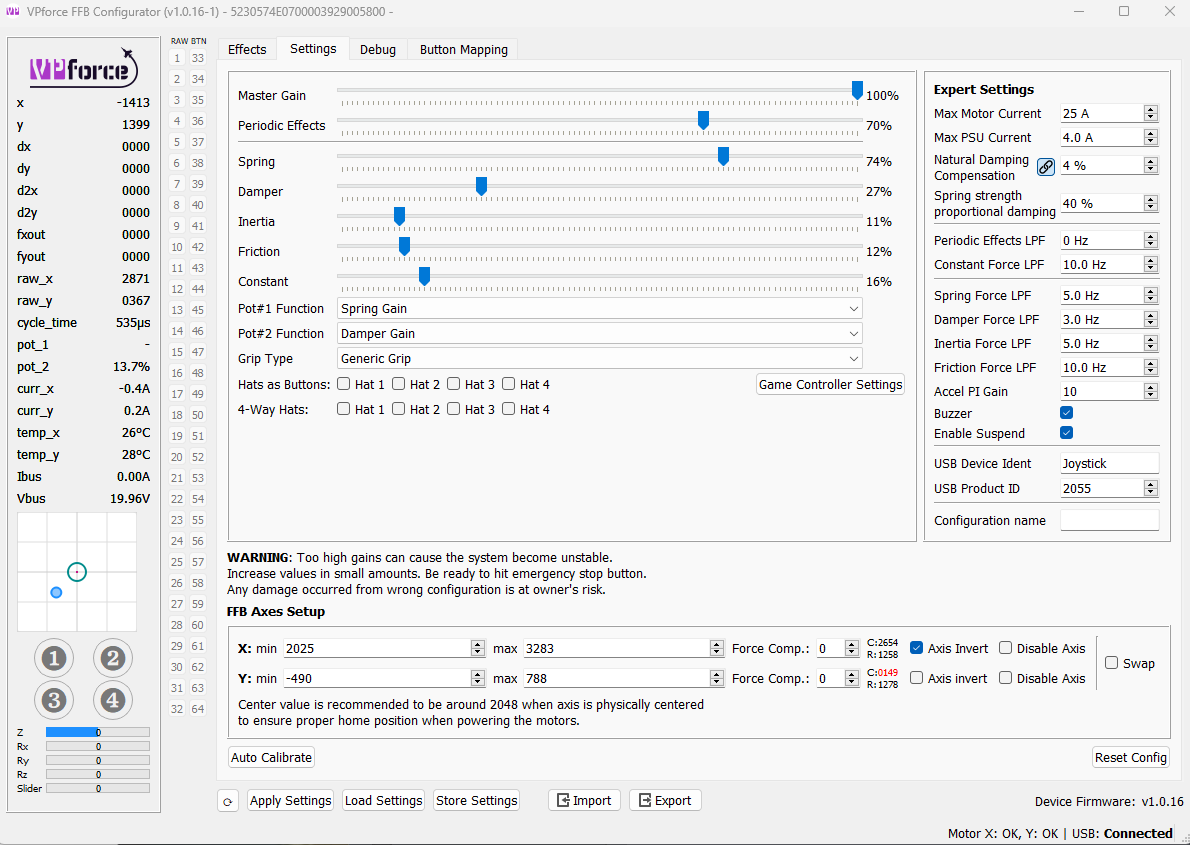
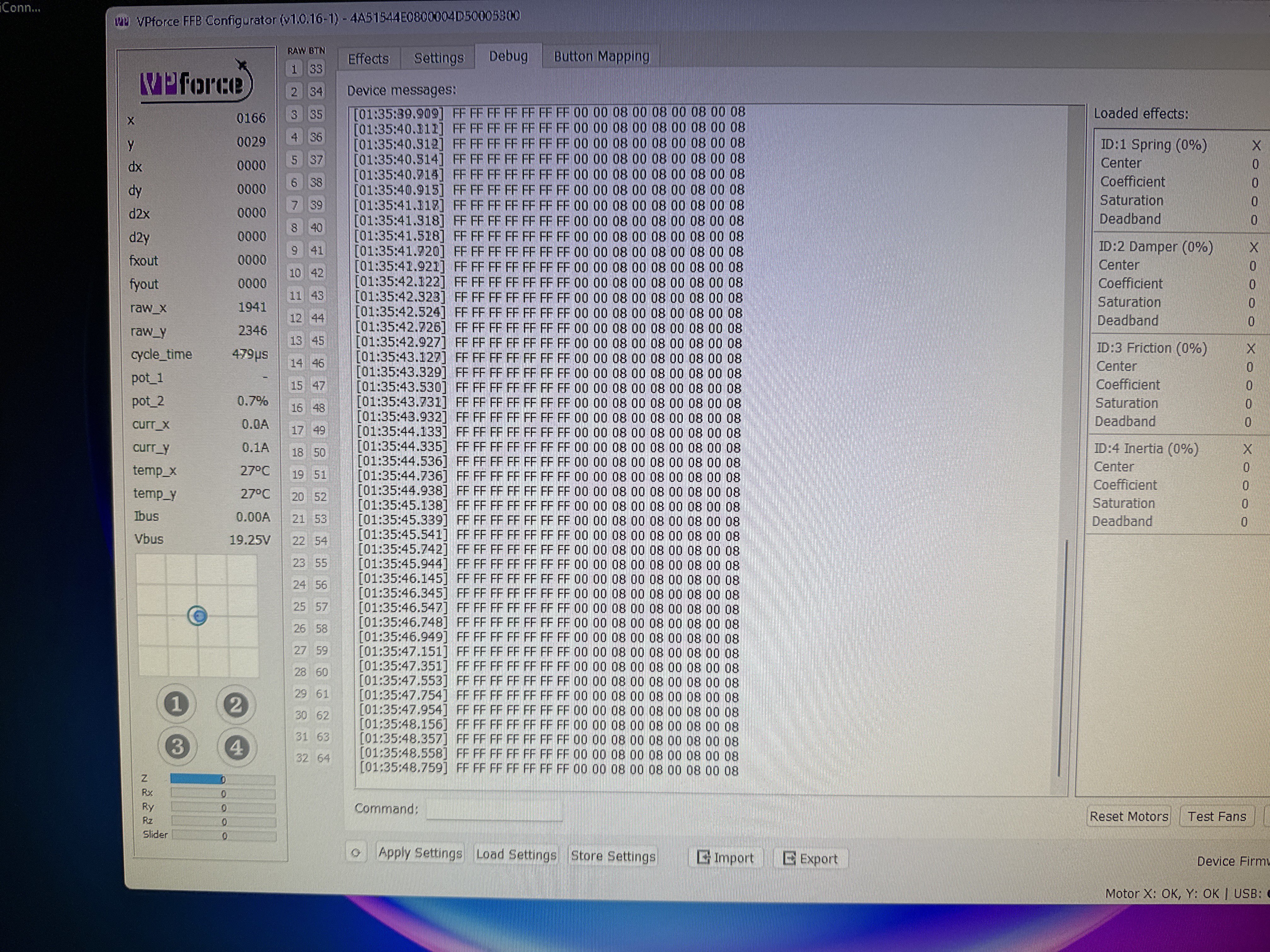
1 In VPC i ve set up a spring , tried end stops and damper, i m getting readouts on all parameters from the right hand side display, X through to Vbus all show dynaimc returns based on stick movement . Bottom right shows Motro X and Y and USB as OK asnd connected . Device Firmware reads 1.0.16 and debug shows i can save and write serttings to memory . The stick feels limp , no real force needed to move it , which is sort of confimed on the X and Y currents which as pulling <0.5 amp . I assume all this is normal
2 Telem FFB (now using latrest WIP version) , ive selected DCS in the Sim setting section , and i get a yellow pause "Sim enabled waiting for data , i launch DCS from Steam , selected multithread, go to settings FFB is enabled , but yellow box does not change
From log file
hid.HIDException:
ReadFile: (0x0000048F) The device is not connected.
2024-03-18 15:49:19.669 - ERROR - joystick - Exception
Traceback (most recent call last):
File "ffb_rhino.py", line 513, in timerEvent
File "ffb_rhino.py", line 582, in readReports
File "hid.py", line 163, in read
File "hid.py", line 148, in __hidcall
hid.HIDException: ReadFile: (0x0000048F) The device is not connected.
1 In VPC i ve set up a spring , tried end stops and damper, i m getting readouts on all parameters from the right hand side display, X through to Vbus all show dynaimc returns based on stick movement . Bottom right shows Motro X and Y and USB as OK asnd connected . Device Firmware reads 1.0.16 and debug shows i can save and write serttings to memory . The stick feels limp , no real force needed to move it , which is sort of confimed on the X and Y currents which as pulling <0.5 amp . I assume all this is normal
2 Telem FFB (now using latrest WIP version) , ive selected DCS in the Sim setting section , and i get a yellow pause "Sim enabled waiting for data , i launch DCS from Steam , selected multithread, go to settings FFB is enabled , but yellow box does not change
From log file
hid.HIDException:
ReadFile: (0x0000048F) The device is not connected.
2024-03-18 15:49:19.669 - ERROR - joystick - Exception
Traceback (most recent call last):
File "ffb_rhino.py", line 513, in timerEvent
File "ffb_rhino.py", line 582, in readReports
File "hid.py", line 163, in read
File "hid.py", line 148, in __hidcall
hid.HIDException: ReadFile: (0x0000048F) The device is not connected.
NWith no sim running, do you get the expected results from your joystick? Spring/damper/ whatever you have set up in configurator?
Bno i did breifly but in VPC i get "no feeling"
NWhat is your device PID set to in configurator ?
NPost screenshots of your configurator settings and effects pages.
BUSB PID = 2055
B