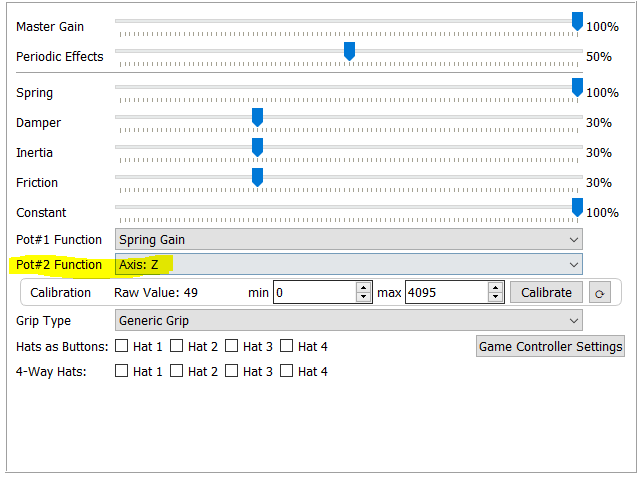
The potentiometer inputs can be assigned as axes in configurator.
The potentiometer inputs can be assigned as axes in configurator.
 T
T S
S S
S N
N HSTT
HSTT STTSTTSTTSTSSTTN
STTSTTSTTSTSSTTN A
A
 T
T S
S N
N
 V
V RHINO #0537 Has Shipped!V
RHINO #0537 Has Shipped!V RHINO #0539 Has Shipped!TH
RHINO #0539 Has Shipped!TH T
T C
C B
B
 WH
WH NBB
NBB BNN
BNN S
S )BBBNBB
)BBBNBB





