Hi. What does it: new privat slash command -mean?
Hi. What does it: new privat slash command -mean?
 S
S
 BB
BB A
A DDD
DDD 1
1 knowledge-base and my stuff went crazy, tried to start all over agin with the first "center" calibration and now my figures arent near 2000, any ideas?1
knowledge-base and my stuff went crazy, tried to start all over agin with the first "center" calibration and now my figures arent near 2000, any ideas?1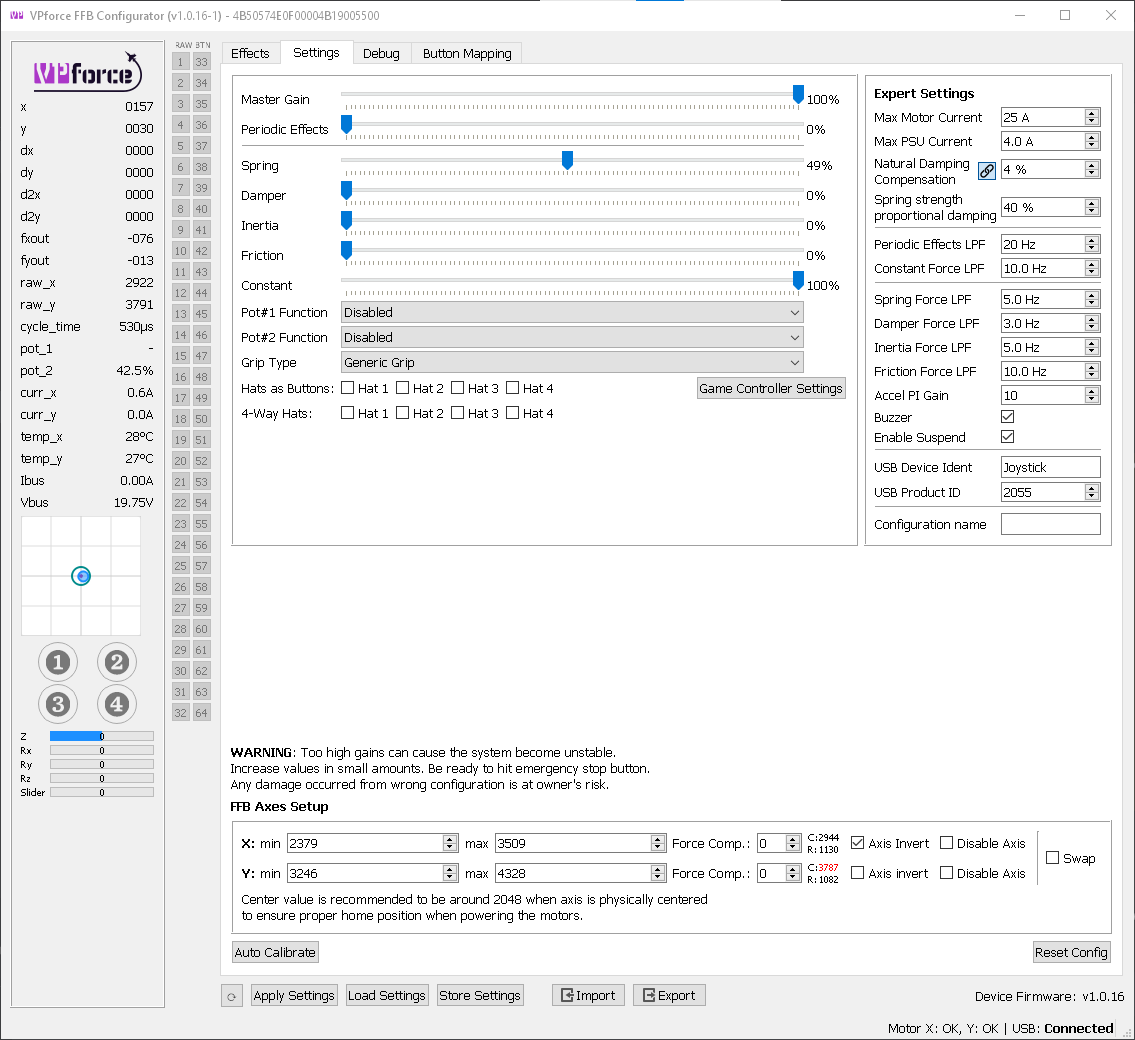 1
1![[OR] SerGeant](https://cdn.discordapp.com/avatars/290181622832168961/338cff3e564800fa5a1068e9c25e28f5.webp?size=40) [1[
[1[ M
M H
H TTTT
TTTT TTTTT1ARRH[1
TTTTT1ARRH[1 M
M PMPMP
PMPMP TTTT
TTTT W
W XXX
XXX T
T TM
TM


![[OR] SerGeant](https://cdn.discordapp.com/avatars/290181622832168961/338cff3e564800fa5a1068e9c25e28f5.webp?size=16)





