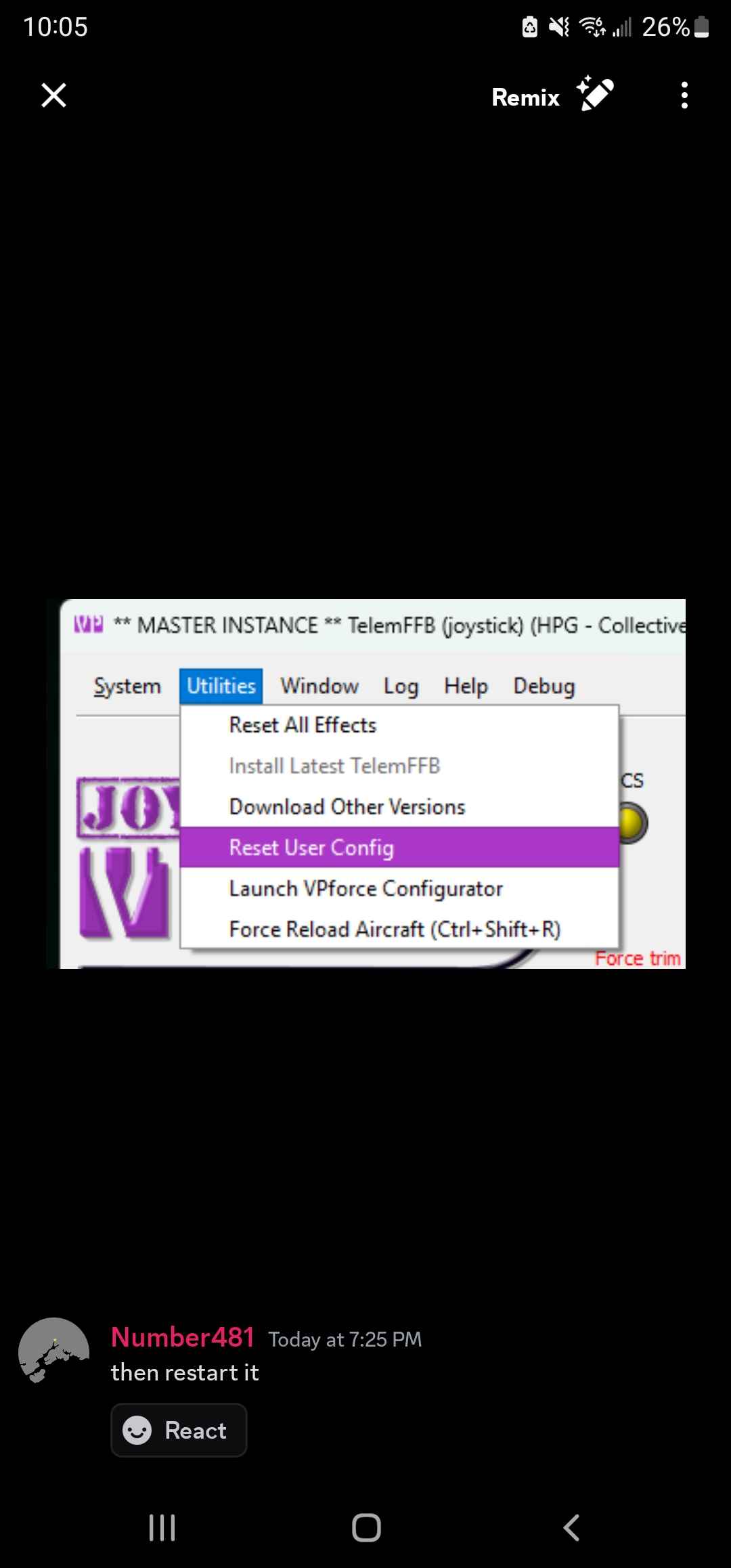
system menu, open config/log directory. rename userconfig.xml to somethign else. reopen telemffb
system menu, open config/log directory. rename userconfig.xml to somethign else. reopen telemffb
 HH
HH SHSH
SHSH SH
SH N
N SH
SH
 MHMNHM
MHMNHM . X-Trident is not on Discord but on X-plane forum……there are many SP users that would benefit from using the VP based controls…….here’s hoping you can do some of your magic
. X-Trident is not on Discord but on X-plane forum……there are many SP users that would benefit from using the VP based controls…….here’s hoping you can do some of your magic cheers
cheers F
F HNHNHHNHN
HNHNHHNHN LFH
LFH
 FHF
FHF
 C
C H
H AHAAH
AHAAH H
H RHARHRAR
RHARHRAR