I haven't looked at the LED stuff. Is there any way to give Rhino software its normal level of contr
I haven't looked at the LED stuff. Is there any way to give Rhino software its normal level of control while letting VPLINK control the LEDs?
 W
W O
O R
R W
W W
W S
S HS
HS JJ
JJ NJJJ
NJJJ RWR
RWR TW
TW FTJ
FTJ T
T R
R F
F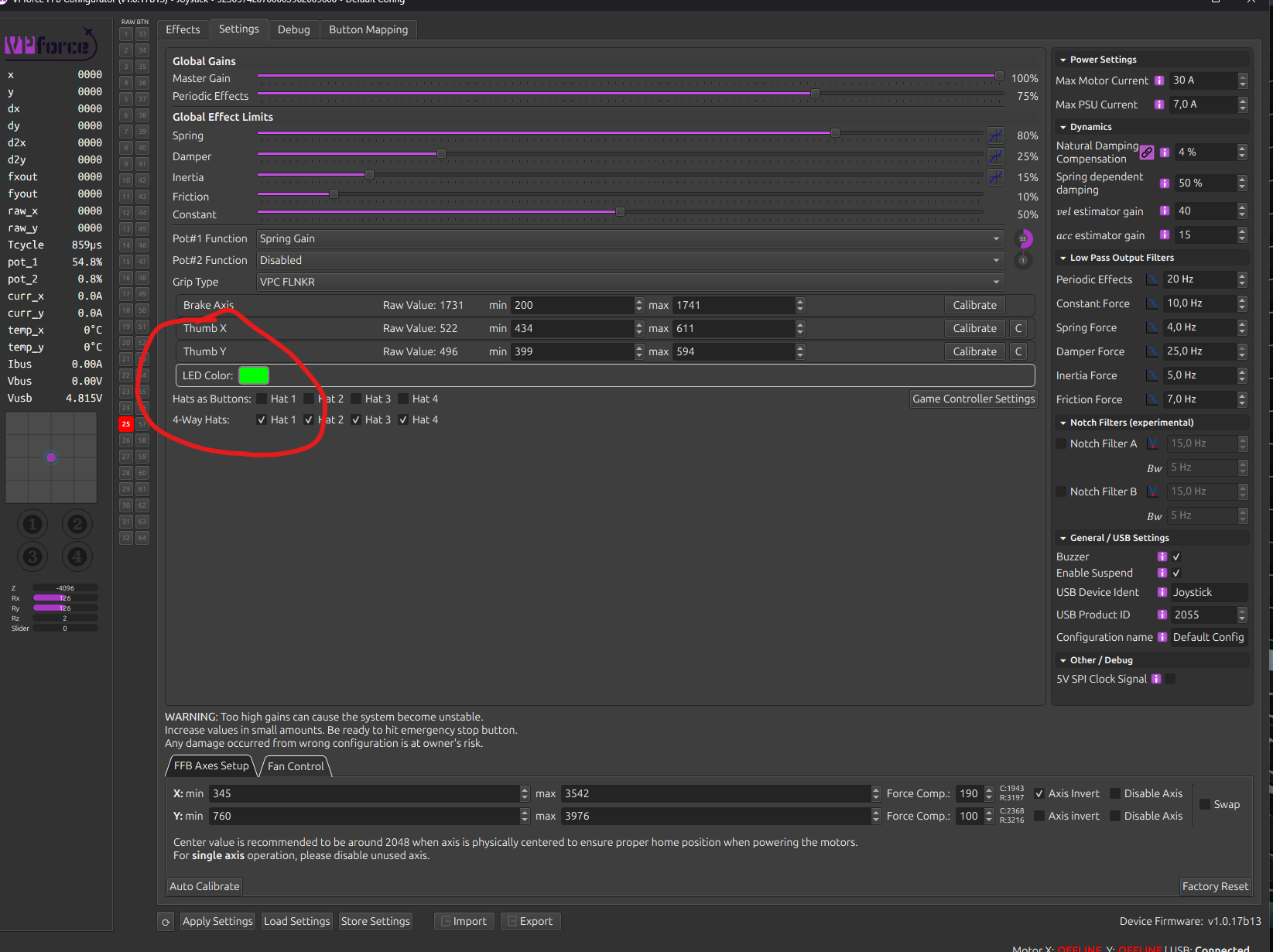 JT
JT T
T KFR
KFR F
F JRTWW
JRTWW FWFWW
FWFWW W
W
 TTWWNRR
TTWWNRR










