
 W
WHow's that going along? Any plans on monetizing it like XPforce ? I think that would be worthwhile to compensate development efforts if you intend to make it work with any FFB implementation.

 P
PI've already built UI part for all effect tuning with curves/scales/frequencies and so on, and part that calculates final forces from telemetry. Now work on device interfacing part. I plan to implement several input interfaces(directx, serial port, custom USB packet, UDP) and several force output interfaces(dierctx, direct force packet via serial port, UDP and so on). But not all of them will come in the first release because of ammount of work. There is support for DCS,MSFS,Warthunder and il-2 telemetry for generating enchanced effects.
At the moment it already supports following effect list for all three axis:
- Natural airdynamic spring dependant on airspeed(including AOA effect that you've illustrated on last picture);
- Natural airdynamic spring dependant on prop thrust(prop wash);
- Artificial spring based on stick/pedal deflection;
- Artificial spring based on AOA;
- Artificial spring based on G;
- Buffeting for stall and mechanisation retraction(gear, airbrake, flaps);
- Landing and on ground rolling effects;
There are ideas for some other effects like gun firing and so on for DCS and il-2 but it require more work so will be implemented later.
Yes, it will be monetized.
At the moment it already supports following effect list for all three axis:
- Natural airdynamic spring dependant on airspeed(including AOA effect that you've illustrated on last picture);
- Natural airdynamic spring dependant on prop thrust(prop wash);
- Artificial spring based on stick/pedal deflection;
- Artificial spring based on AOA;
- Artificial spring based on G;
- Buffeting for stall and mechanisation retraction(gear, airbrake, flaps);
- Landing and on ground rolling effects;
There are ideas for some other effects like gun firing and so on for DCS and il-2 but it require more work so will be implemented later.
Yes, it will be monetized.
WWhat kind of framework/libs do you use?
Wjust a FYI, libSDL has a very good abstraction of the DirectInput FFB api
Pjust standard microsoft directinput device  But I will look into libSDL.
But I will look into libSDL.
But I will look into libSDL.WI posted an example a while ago
https://discord.com/channels/965234441511383080/972180323787997255/1014224764308553768
It's in Python, but it's a direct binding to libSDL C/C++ library
https://discord.com/channels/965234441511383080/972180323787997255/1014224764308553768
It's in Python, but it's a direct binding to libSDL C/C++ library
 R
RThat hurts my brain. 
Are you saying if you invert the constant force in VPforce the problem in XPforce should be gone?
Are you saying if you invert the constant force in VPforce the problem in XPforce should be gone?
WYeah, I fixed this in the pending firmware update
RCool! I'll stop looking at that drawing then trying to understand it
R(My brain tells me the stick should want to move forward during a nose up AOA) 
 V
VHey @kiwi320,
So the last Shipped RHINO is #0030 on 2022-12-08
Average waiting time from preorder to shipped is 85 days, median is 109 days, max is 156 days
28 Rhinos are shipped in total
So the last Shipped RHINO is #0030 on 2022-12-08
Average waiting time from preorder to shipped is 85 days, median is 109 days, max is 156 days
28 Rhinos are shipped in total
ADefinitely! This would most certainly help with the immersion and feedback on your actions/pitch/controls input
AI'd really like to keep track of it and try it once it is available. What's the best way to stay informed on the developments?
W
 J
JHmm, I think you are right. When you fly a stall with a plane you have to pull hard at the yoke/stick because it wants to move forward, right?
WI think it would be opposite, the elevators would move into the airflow, since your nose is up, the stick would tend to move back (towards the pilot) + buffeting due to turbulent airflow. Not an expert though, could be wrong
JBut that would mean that the plane has the tendency to increase the AOA by itself and would not be inherently stable.
W W
WIt shouldn't force the stick more than the airflow, so it's kinda
Wmore research needed 
 M
Malso highly dependent on aircraft type, control loading type, danger of AOA is past a certain point the wing will stall regardless of speed, at high AOA even in a PA28 during a power on stall you are pulling back hard, but of course you could trim out the control force to hold that high AOA, With the F18 Hornet they significantly increase the stick force required as AOA increases, With the Hawk a Spring is used for artificial feel but the hydraulic control system is easily capable of exceeding AOA and not to mention G's very very quickly
 W
WYeah definitely, I was thinking more in terms of small GA aircraft
 I
IAny GA aircraft I’ve flown it would be impossible to stall the airplane hands off even trimmed all the way back. (Assuming you are within CG). The slower you get, including stall you will have more and more force to pull back. I’m a CFI for reference.
 W
WHi Walmis
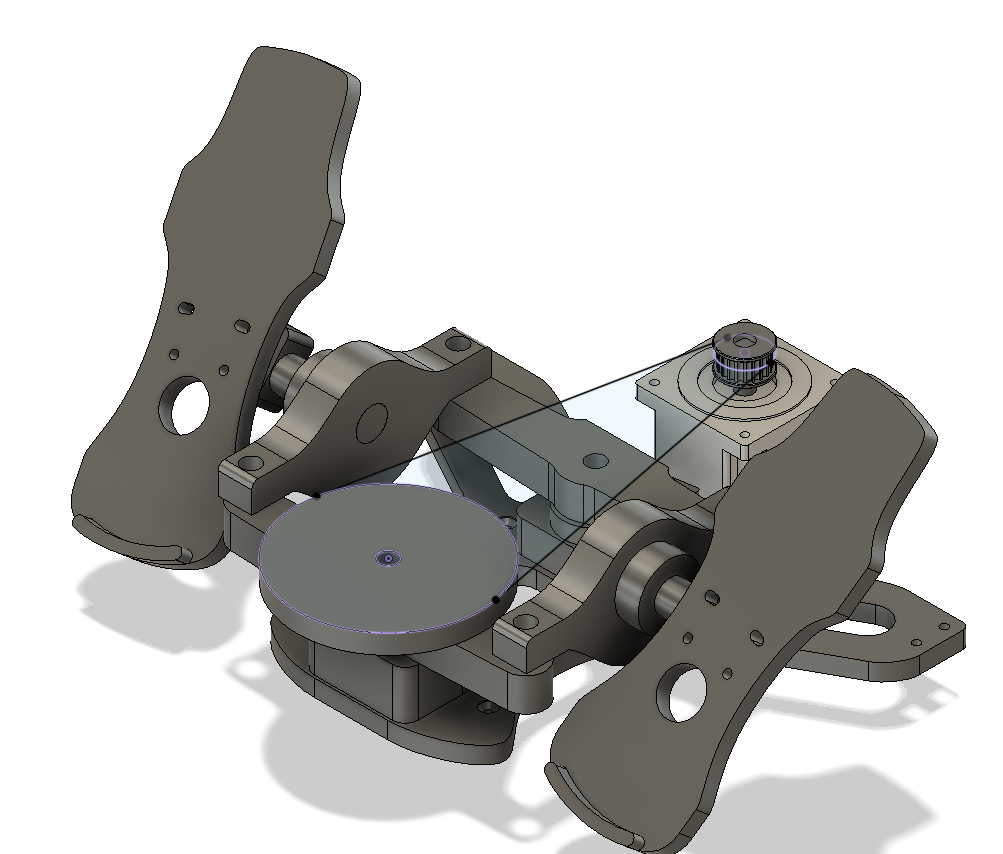
I’ve got some loose plans for my MFG:s…but no point (expect dampening/variable spring etc) if force trim doesn’t work. Currently for the Apache I’m using the FFB option for the cyclic, works really well .
.
For the pedals I use “Pedals trimmer mode - Pedals without springs and FFB” option meaning the pedals are not affected by the Force Trim release etc => I have to hold them in the correct position against the spring which works but gets tiring after a while.
Just thinking out loud, if I buy another motor and USB Controller for the pedals could you arrange for the Cyclic USB Controller to tell the Pedals USB Controller to readjust the spring center based on buttons pressed on the cyclic?
So for the Apache it would be something like this:
I press the button assigned to Force Trim on the cyclic, this command gets sent via the Cyclic USB Controller to DCS via DirectX as normal and the spring is released.
Simultaneously a command is sent from the Cyclic USB Controller to the Pedals USB Controller to release the spring for the pedals.
When I release the Force Trim on the cyclic the command gets sent to DCS via the Cyclic USB Controller and the cyclic springs re-engage with a new center point. Simultaneously a command is sent from the Cyclic USB Controller to the Pedals USB Controller to reengage the spring at the current position.
Would probably be a good idea to have reset spring center option as well + bump trim options.
I’ve got some loose plans for my MFG:s…but no point (expect dampening/variable spring etc) if force trim doesn’t work. Currently for the Apache I’m using the FFB option for the cyclic, works really well
.For the pedals I use “Pedals trimmer mode - Pedals without springs and FFB” option meaning the pedals are not affected by the Force Trim release etc => I have to hold them in the correct position against the spring which works but gets tiring after a while.
Just thinking out loud, if I buy another motor and USB Controller for the pedals could you arrange for the Cyclic USB Controller to tell the Pedals USB Controller to readjust the spring center based on buttons pressed on the cyclic?
So for the Apache it would be something like this:
I press the button assigned to Force Trim on the cyclic, this command gets sent via the Cyclic USB Controller to DCS via DirectX as normal and the spring is released.
Simultaneously a command is sent from the Cyclic USB Controller to the Pedals USB Controller to release the spring for the pedals.
When I release the Force Trim on the cyclic the command gets sent to DCS via the Cyclic USB Controller and the cyclic springs re-engage with a new center point. Simultaneously a command is sent from the Cyclic USB Controller to the Pedals USB Controller to reengage the spring at the current position.
Would probably be a good idea to have reset spring center option as well + bump trim options.
 W
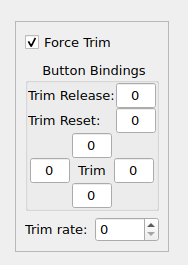
WYes, you will be able to bind the trim to the pedal controller using the "Loopback" grip option (It's a way to pass buttons from any controller in windows back to the FFB board)
 W
W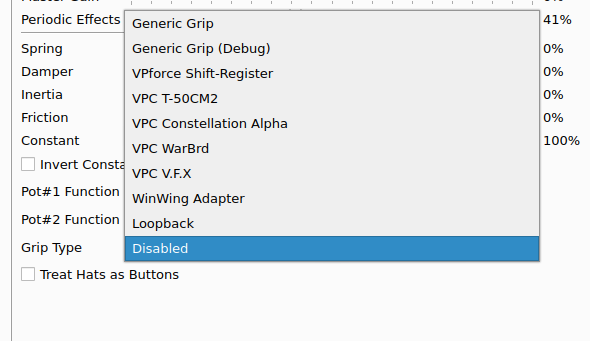 W
WNew version in the works
WOohhh….very nice.
I’m now thinking a little bit about the A10C yaw/rudder trim, which is an axis rather than a button…I guess that it wouldn’t be impossible have an axis as the loopback control in the future.......
I’m now thinking a little bit about the A10C yaw/rudder trim, which is an axis rather than a button…I guess that it wouldn’t be impossible have an axis as the loopback control in the future.......

 S
Sas far as i understand it (and i have nothing built yet so this is a guess) you wont need to use in-game trims anymore, you use the upcoming hardware trim, which moves the stick center, and that just acts like you are holding the stick in that position.
 W
WYep, that's exactly right
 M
MCondor/2 has a checkbox for them in the UI, though not sure if it does anything

 原
原Do they have motorized collective in the real one tho? I'm only aware of that they use motors for the active (helo) flight controls on some really models..
原@walmis I think it also depends on another factor: the static stability characteristic of the aircraft. Most aircraft has positive static stability especially for the small GA trainers, which has the tendency to return to its original attitude, bcz since the Center of Lift is behind the Center of Gravity, the increased lift caused by the increased AoA will give you a nose down effect that has to be countered with more back pressure(pulling back) on the yoke/stick.
And I'm not sure how much the weathervaning into the wind of the elevator will affect the force requested on the controls...Didn't pay much of attention to that part during the flight training, plus trims are used more or less during slow-flight and stall/spin practice...and, for the slow-flight, which is an ideal high stabled AoA flight condition, the plane is trimmed eventually and the only thing I remember is the controls are already sluggish by themselves due to the lower airspeed etc.
But it might be negligible comparing to the increased Lift you have to counter
One more thing tho, for the modern aircraft that equipped moves the control surfaces with hydraulic system, I'd guess they are held more firmly by the hydraulic pressure and being exempted from weathervaning; moreover, the trim system on these type plane is usually changing the angle of incidence of the entire stabilizer(i.e. moving it up and down as a whole) and the trimmed position is held by hydraulic brakes and might also by the jackscrew itself which is used to move the stabilizer, so that might neglect the weathervaning as well? even there is one.
Being away from ground school for quite a while and some of the knowledge is beyond those textbooks so pls correct me if I get it wrong
And I'm not sure how much the weathervaning into the wind of the elevator will affect the force requested on the controls...Didn't pay much of attention to that part during the flight training, plus trims are used more or less during slow-flight and stall/spin practice...and, for the slow-flight, which is an ideal high stabled AoA flight condition, the plane is trimmed eventually and the only thing I remember is the controls are already sluggish by themselves due to the lower airspeed etc.
But it might be negligible comparing to the increased Lift you have to counter
One more thing tho, for the modern aircraft that equipped moves the control surfaces with hydraulic system, I'd guess they are held more firmly by the hydraulic pressure and being exempted from weathervaning; moreover, the trim system on these type plane is usually changing the angle of incidence of the entire stabilizer(i.e. moving it up and down as a whole) and the trimmed position is held by hydraulic brakes and might also by the jackscrew itself which is used to move the stabilizer, so that might neglect the weathervaning as well? even there is one.
Being away from ground school for quite a while and some of the knowledge is beyond those textbooks so pls correct me if I get it wrong
原Oh FBW of course is another story but it is worth mentioning that, it seems lots if not most of the modern hydraulically controlled aircraft also don't have the aerodynamic force feedback from the control surfaces.. they just use springs and dampers etc., just like the FBWers. No direct mechanical link, nor 2-way hydraulic. (Backdrive) Motors/actuators are used for AP as well as for trimming, and some FBWers uses backdrive motors to provide FFB tho.
原and for the weathervaning, it might be move the elevator flush(?) to the air flow but I doubt it would provide substantial nose up force. It might be able to relief a bit of force required to pitch up but I don't think it's significant enough to make it feels the opposite way, taking into account of the aforementioned huge amount of lift increasing you have to fight with.
Overall it feels hard(er?) to pull, especially for doing some deep stall/spin in the GA trainer
Overall it feels hard(er?) to pull, especially for doing some deep stall/spin in the GA trainer
 S
SIf you get this MFG mod up and going, would you be willing to share your plans? I'd love to buy a motor after I get my rhino and modify my mfg like this 
 S
Shttps://apps.dtic.mil/sti/citations/ADA324124 This has formulas, specifications and feel of the forces you would feel for multiple different aircraft controls like what MudMover was talking about. I'm reading it now and im probably going to reference back to this a lot in my future projects.
DTIC
Since the earliest days of manned flight, designers have to sought to assist the pilot in the performance of tasks by using stick and feel systems to bring these tasks within the bounds of human physical capabilities. This volume describes stick and feel systems in two parts. Part one describes the technologies which have been developed througho...
SHave you noticed for the Apache under special options when you select or options from the drop downs there is a speed limit to the input. I started flying with my stick and pedals on instant trim option since the day the Apache came out and I didn't realize that my controls where lagging until a few days ago I saw my friends controls and his where perfectly in sync so I had to do some investigation until I found that to fix this I had to choose the
SI thought that the Apache was just really hard to fly compared to other helicopter modules and it took me a while to get used to flying it like this.
SIm still forced to fly with the lag on the pedals though because
Joystick Without Springs and FFB is the only option that doesn't trim my center since I use pedals with only damper J
J... HOLY SHIT.
JI'd never noticed that!
JAnd it's not even a subtle difference.
Syeah its huge. I cant believe I suffered for so long. Everyone needs to know or this needs to be fixed asap
Salso they need to fix the trimming response curvature for ffb users
SThanks, cant wait to try out Fino
 J
JYeah, responded with a video to a topic discussing this on the forums, which up until now had been listed as "Solved".
https://forum.dcs.world/topic/313711-cyclic-stick-deflection-rate-slower-than-actual-joystick/?do=findComment&comment=5106427
https://forum.dcs.world/topic/313711-cyclic-stick-deflection-rate-slower-than-actual-joystick/?do=findComment&comment=5106427
ED Forums
For example, when the actual joystick deflects from max left to max right quickly, the cyclic stick in game just deflects from max left to max right slowly, not fully synced to the actual joystick. Is it intended, can I get rid of it? I prefer that they are synced, could give more controllability.
S S
SI also have
SI will post