 T
TYep, got my kit yesterday! Super impressed with everything! Thank you so much for all the help!! 

 W
Wyep, jst-xh
 G
G@smitty#5756 hey, I was looking at those gear reduction planetaries you listed. Is there a huge benefit to using those? I would imagine it allows the motors to spin alot further for the same amount of stick deflection.
GDoes that allow different force outputs? Or maybe a more "accurate" force?
 R
RI think they up torque motor spins faster producing more total power, gear reduction slows the rotation down so power equation result raises the torque.
 S
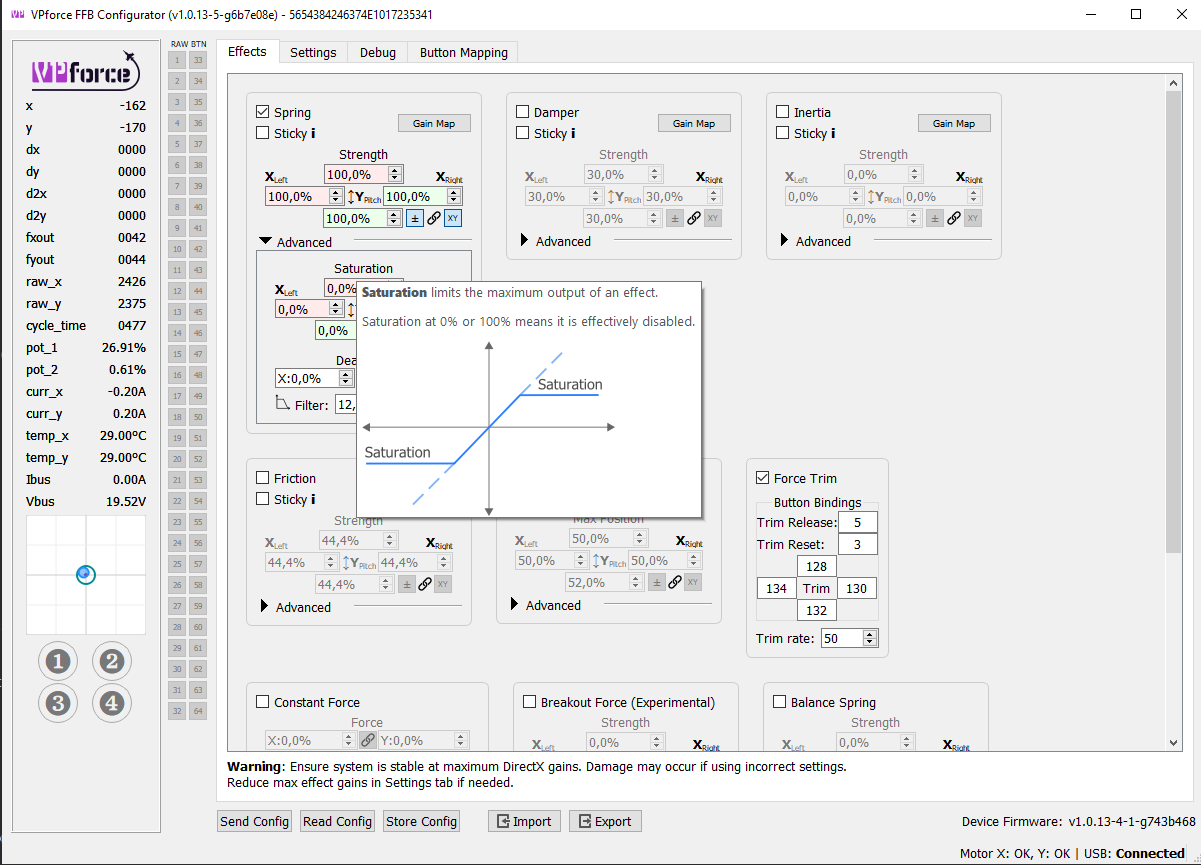
SI made a first effort on the manual. Have a look and add what you can. Btw, what are the four empty boxes around the trim setting for?
 W
WThanks.
In case you haven't discovered yet, if you hover mouse on some controls you will get a tooltip.
In case you haven't discovered yet, if you hover mouse on some controls you will get a tooltip.
WCurrently also working on documenting stuff in the app itself, for example:
 S
Sis there a place we could list the dcs bugs that give weird FFB behavior? For example, curves applied to pitch and roll give weird behavior in the Huey and the F5E

 A
AHype! New update sneak peak! How’s it deal with belt stretch with higher forces?
 W
WNot an issue any more 
AOh I was curious if it’s a setting you have to configure. Either way tho, can’t wait for the update!
WYeah it's configurable, but I have rough default values for Rhino
WKit owners will have different settings for their mechanics 
ALike you do a calibrate axis with some constant forces applied?
AThen it can figure out deltas mathematically?
WIt's a bit more crude for the initial release
WYou basically calibrate as usual and then increase the compensation value until it reaches the logical axis edge while under spring force
AAhh
Wbut works great!
AYee! Hopefully release soon?  happy to beta test if you need anyone too
happy to beta test if you need anyone too
happy to beta test if you need anyone tooAi've noticed every time i plug in the rhino, a little interesting notification appears, is there a way to disable that? i've had windows derp and sometimes get it stuck, and i can't dismiss it
WWebusb notification?
Ayeah that might be it
WIt's from the browser - Edge, Chrome?
A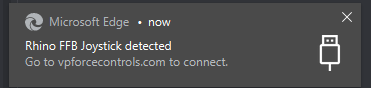
 S
SStupid question, but how do you get DCS to send input to vp force app? I was looking on the debug loaded effects but nothing shows up. So not receiving any shaking effects or trim. Vpforce app works just fine though on its own (loving the motors)
AMiiight depend on the module you’re using?
SI've been using the spitfire, huey, and f5 so far. I'm pretty sure I'm using the app incorrectly
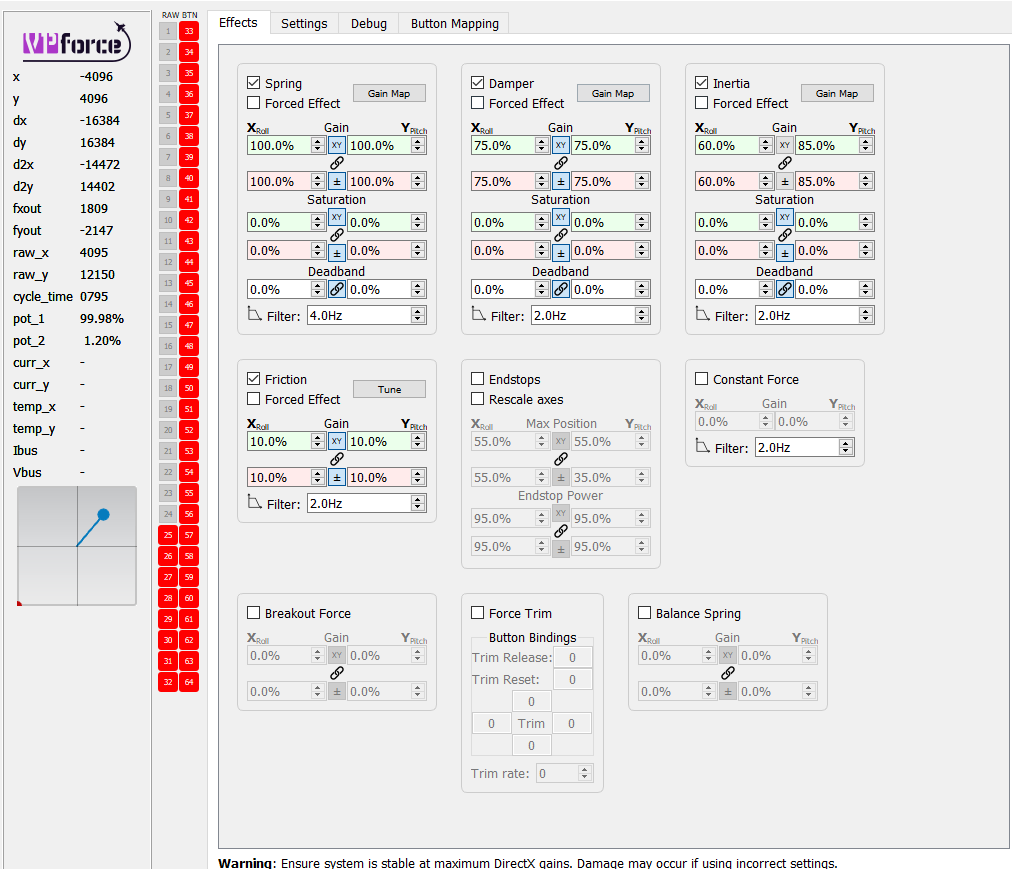
A spitfire def has some force feedback, but it was implemented pretty poorly from my tests. Screenshot of how you have things configured? The effects tab and the one with the sliders for effects
spitfire def has some force feedback, but it was implemented pretty poorly from my tests. Screenshot of how you have things configured? The effects tab and the one with the sliders for effects M
MWhat’s weird about the f5?
 S
SOther things I've tried so far: move files to a folder rather than keeping it on the rar file, and running vpforce in admin mode
AWhy are all your buttons showing as activated at once?
ANot all, but a bunch anyways
SI'm not sure, it's the TM f18 grip
SI do use simshaker for my jetseat and buttkicker, not sure if that has anything to do with feedback not being received from dcs
AWtf, that screenshot didn’t work lol
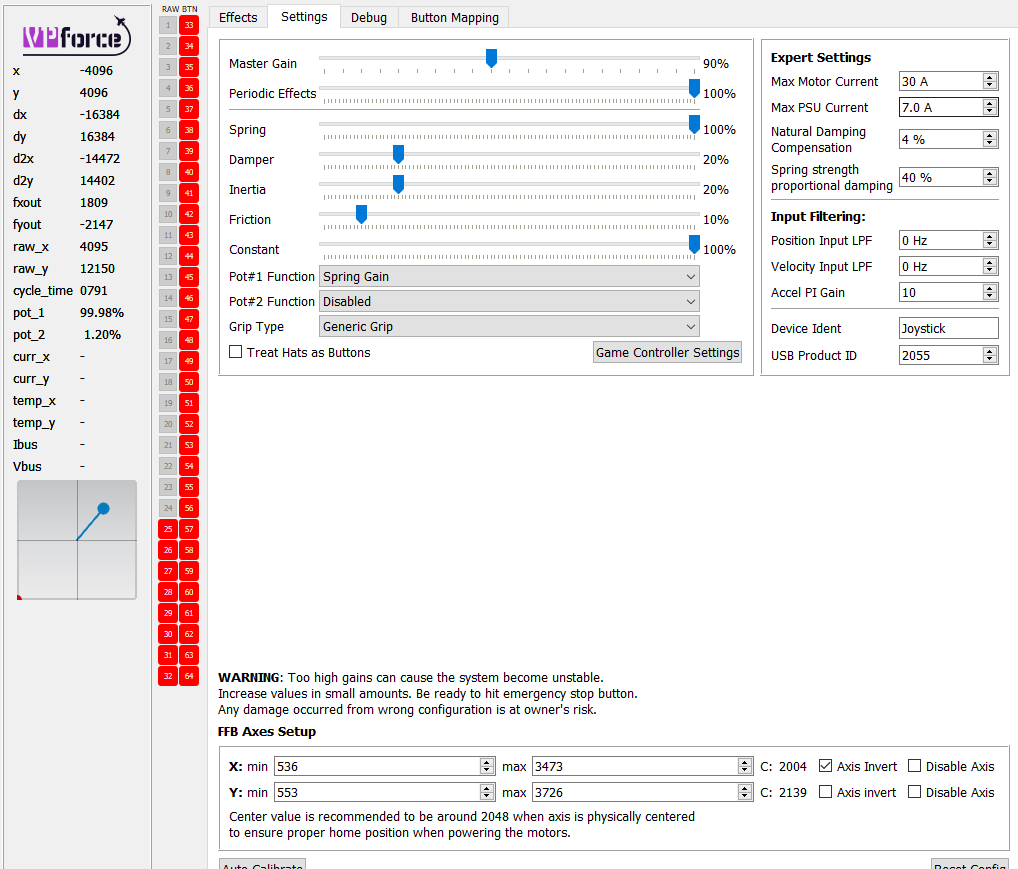
AGrip Type — find your grip and set it there
SWill do! Just checked, just VPC grips are there, also ww adapter
SI'll try generic grip debug though
 S
Swhen curves are applied, the center point of the stick is off
 A
AYour stuff looks like it’s configured fine tho, the only thing I would probably go through is just like, disable all effects, crank all the sliders to 100, and test… for me tho, force feedback in DCS just worked
SAh ok! Like go to in effects and untick all the boxes? And also, the force effect 2nd box underneath, that's just for vpforce to override any game input, right? Thank you very much for the help and suggestions by the way!
 L
LAlso check that you enabled Force Feedback in DCS
 S
SYep, made sure it was on at first and then off, for the huey and f5 anyway. I'm about to try it with all the effects off
SWow I'm dumb, I didn't even know there was a ffb option in the option menu, I thought it was only through the special tab for individual modules. My old ffb stick, I used an app that would override dcs, figures. Thank you for making me double check my options 
SEverything works as it should now!!
 S
Syes the gearboxes at 10:1 allow for much higher forces at the grip than the 5:1 (? not sure what exact pulley ratio is) belt system. 35deg full throw translates to 350 degrees of the motor is used. Any more and the encoder gets stupid and if you switch it on at the endpoint it will think its on the next rotation. so keeping it under 360 works great. these are ultra low backlash servo gearboxes, i tried some cheapo ones first and it jus felt sloppy. plus they have a beefy bearing in them to act as at least one of the gimbal axes. i dont have it fully built yet but just bench testing with the flight stick in one axis felt wonderful