
 P
PWW
Pcan I just trim the wire from extension?
Pit's when it bunches up in the grip that it stops working, is it just normal wires inside?
 W
Wyeah, actually 3 wires are only used
PI think I'll just do this tomorrow when I can get some heat shrink for it
Pcheers for your help m8
 F
FHello after plugging a new control to my pc with DCS open my rhino loose it’s ffb capability just works as a regular joystick, and I have to restart DCS to get back the ffb, any idea what this happens or how to solve it ?
 D
DIt could be the USB hub?
DMight drop power to the RHINO?
FDon’t know maybe has something to do with windows because in my other pc it doesn’t have that behavior
DWith the same USB hub?
FYep
PHow do I calibrate with a physical endstop? do I uncheck software endstop to start I guess? then what about calibration without the stick ending up off set to the front?
PI'm also getting instability when using the default profile & endstops, moving side to aide x axis
P@walmis sorry to @ you again, but can you help with telling me how to calibrate with the physical endstop? cheers m8
PI can calibrate it obviously but it's not ending up 'off set' for the limiter
 W
WYeah, disable endstops and axis scaling and calibrate the using the auto calibrate tool
P& this will have the stick end up "off set" for the limiter? ie. Y axis 35%+ 50%-?
WYou will need to manually tweak the axis scaling and calibration values.
Calibrate as you would always do, then increase the calibrated
Calibrate as you would always do, then increase the calibrated
Y max value so the stick roughly centers, then enable axis scaling, leave all axis at 100%, but reduce Y fwd % so it matches full logical travel when it reaches the endstop.Pcan you tell me what in my setting would be giving me instability when moving along the axis?
 W
WTry maybe damper LPF at 4-6Hz
WInertia and frinction also reduce stability
PY axis is good with 5.0Hz but can still feel slight bit on X axis??
Wdoes it vibrate ?
Pyeah that's what I meant by "instability" sorry, it vibrated violently then motor safety kicked in. Now with the 5.0Hz & I dropped Inertia & dampner by 5% each I still feel very slight vibration in x axis, like it may go in game
WTry 4Hz damper
Pok thanks that got it! Now I just need to try get the calibration/axis scaling done right  . Thanks so much for your help Walmis it's very much appreciated m8
. Thanks so much for your help Walmis it's very much appreciated m8
. Thanks so much for your help Walmis it's very much appreciated m8Poh also are you considering making new vkb adapters for the new attachment they have? sick of how mine always end up loose, I want to change the parts over soon
Pomg why does it feel like I'm doing what you described but I'm just not getting the desired outcome 
Phey m8 I'm sorry to keep bothering you, I calibrated as normal then I had to lower not increase the Y max value to move the stick forward to around the center, then I put axis scaling at 65% forward & leave the rear Y @100%. When it comes to the X axis the physical limiter is at 50% do I need to adjust the X max value or just use the axis scaling to limit the X +/- axis?
Ptesting this seems to be getting my heat up to 50°c & the fans going, I've never really had this before
Pseems like pulling back on Y axis is getting the temp up, I had these same setting previously with the software endstops & I never really had the fans kick in during use, maybe it's just cause I'm testing it & not using it 'normally'. I'll see how it is in game, if I make it
Pcontinued 'testing' with the Y axis looks like the last ~3% or so of the axis is not registered I mean the last 'little bit' I pull back on the stick isn't registering on the axis as it's already registering full deflection
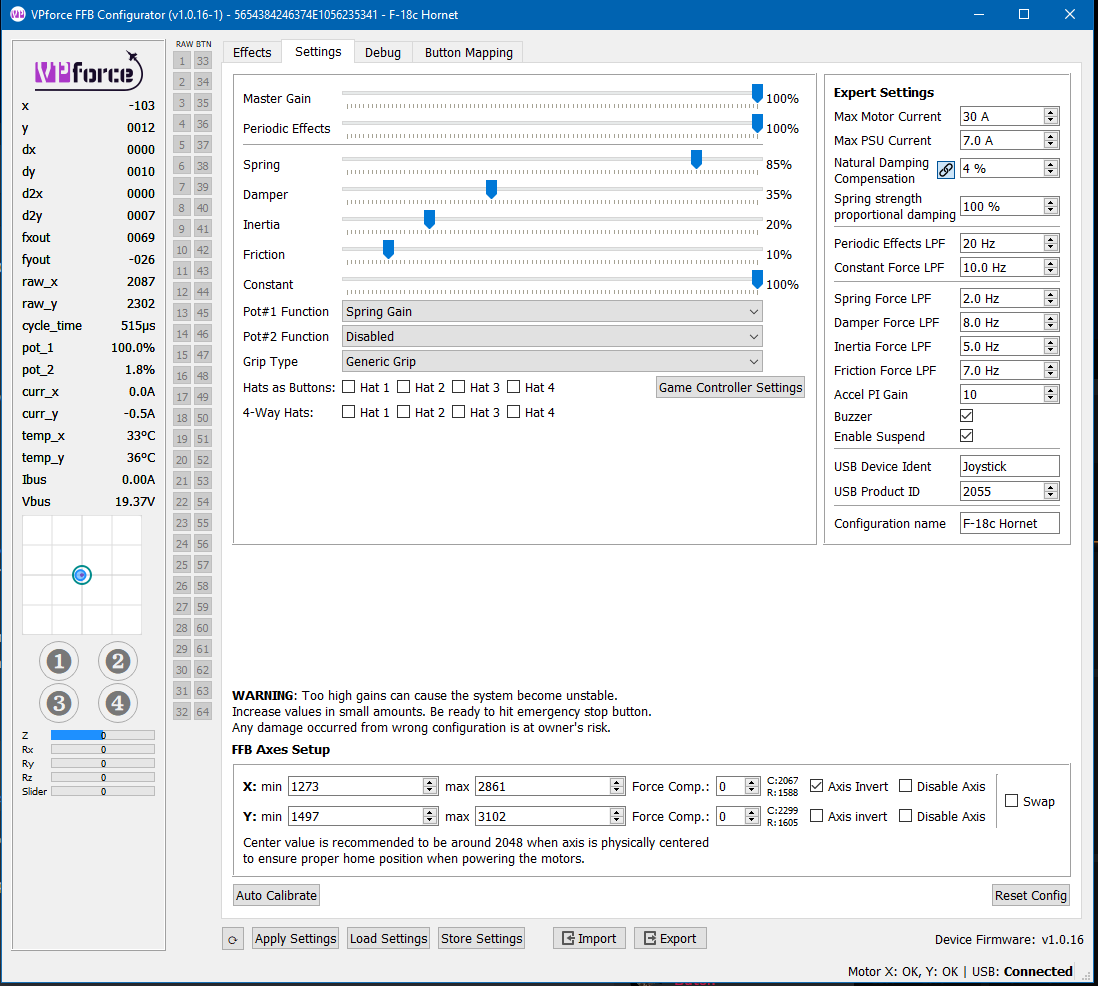
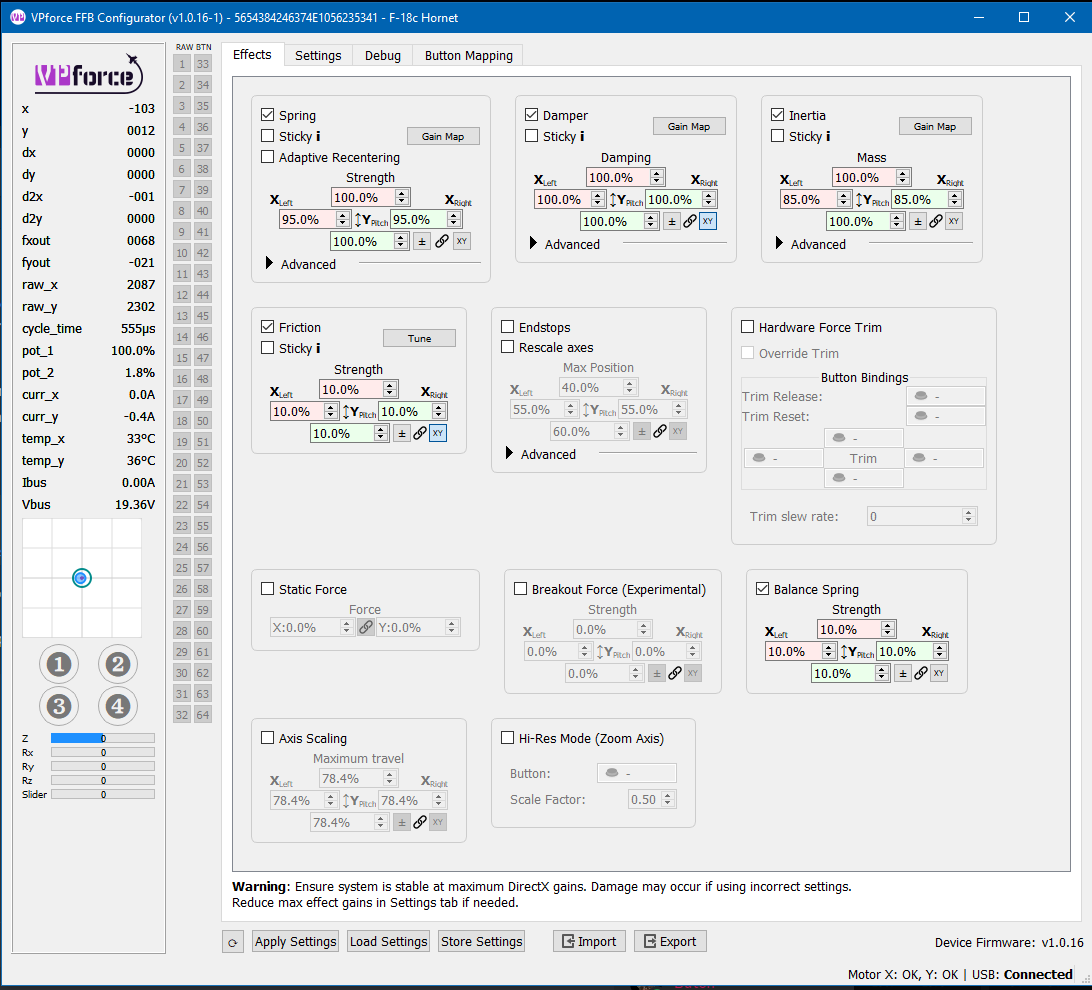
Pgetting the slightest vibration if I go from holding X full deflection for a moment to the other side of the axis. I'm going to post pics of my settings (this is meant to be for a F-18c) can Walmis or anyone point out what settings might be giving me trouble. Also I think I got the calibration & axis scaling done right now though not 100% sure, the blue ball goes halfway across when on full deflection on both axis
P
 W
WRecommend setting this, to compensate axis flex under force.
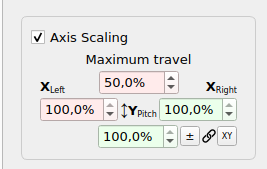
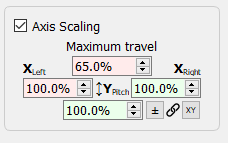
As for the axis scaling. Once you do the axis calibration you need to manually tweak the Y max, so that the stick is centered and not leaning back when neutral. This is because of asymmetric throw. Once you have that setup, enable axis scaling. I imagine it should be something like (in the pic).
As for the axis scaling. Once you do the axis calibration you need to manually tweak the Y max, so that the stick is centered and not leaning back when neutral. This is because of asymmetric throw. Once you have that setup, enable axis scaling. I imagine it should be something like (in the pic).

 P
Pyep after I did the calibration I needed to reduce the Y Max number to move the stick forward to where the center would be my limiter is Y+ 35% Y-60% X+/-50%
Pso this would be right for my axis scaling? it seems to be good except the x axis not quite registering full deflection & still getting the bit at the end of Y axis that isn't registering, I have checked the grub screws too
 P
P@walmis sorry again m8 but I can't get this Y axis to register the last bit of movement rear, in the video when I have the blue ball all the way down you see the red arrow moving again, that is me pulling the last extent of the axis to full deflection, I have added the 190 & 100 Force comp & my settings are in the screen shots above, m8 sorry to bug you but I can't figure this out myself
WNote the raw values, and adjust your calibration accordingly:
 P
Pok cheers, doing so now
WFrom the video it looks like it reaches 3000, but your CAL is 2700
Psorry so I understand, when do I take the numbers from the raw data? do I pull stick to max deflection & take that number to the Y Max?
PWhat if I remove the physical limiter, calibrate, install the limiter, change axis scaling to 50% +/- X axis & 35% + Y & 60% -Y????
WIt might be simpler that way
WOr you can check the numbers from another saved profile before the limiter
Pyep just thought of that, just loaded an old one 
POk that did it, just put limiter on then adjust axis scaling
 M
MHi, anyone here using a real simulator grip with the Rhino? I have some questions....
MI am using the grip as a standalone grip. I dont really need all the bells and whistles full functionality via the RS software and want to use it on the Rhino FFB base. I simply need the grip to function as a normal HID device via the rhino base.
On first try it seemed there was some issues with button numbers being double assigned and some not being picked up.
Whats the suggested best way to proceed setting it up given the useage scenario described above? I want to try and avoid all the Real Simulator bluetooth issues.....
On first try it seemed there was some issues with button numbers being double assigned and some not being picked up.
Whats the suggested best way to proceed setting it up given the useage scenario described above? I want to try and avoid all the Real Simulator bluetooth issues.....