I’m not sure what you mean. It’s doesn’t do this when connected to my Winwing base.
I’m not sure what you mean. It’s doesn’t do this when connected to my Winwing base.
 C
C SS
SS D
D![SR-F_Winger_[73]_David](https://cdn.discordapp.com/avatars/98037306870472704/f924b51d2e4486c1eb873c2f4fb7f6a3.webp?size=40) SSD
SSD
 F
F V
V RHINO #0803 Has Shipped!
RHINO #0803 Has Shipped! WF
WF F
F II
II M
M HH
HH FH
FH . @walmis What is the current draw of the 86BLF04?FHFHH
. @walmis What is the current draw of the 86BLF04?FHFHH EHEHEH
EHEHEH MWW
MWWmotor amps != PSU amps HHW
HHW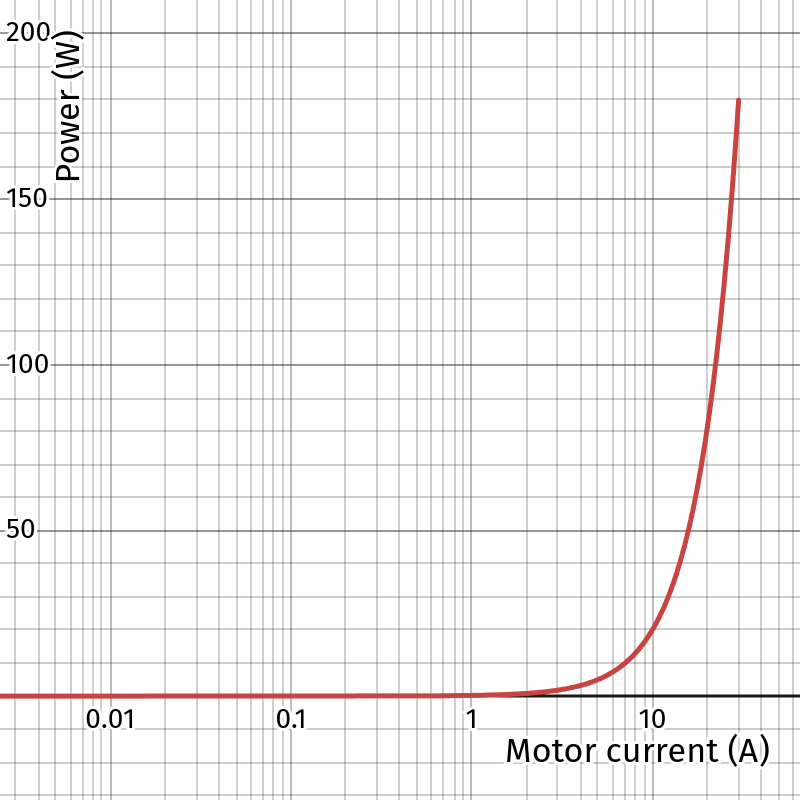
 FHFFHH
FHFFHH Y
Y C
C R
R HRR
HRR SH
SH

![SR-F_Winger_[73]_David](https://cdn.discordapp.com/avatars/98037306870472704/f924b51d2e4486c1eb873c2f4fb7f6a3.webp?size=16)





