You should be able to tune this with the spring curve tool
You should be able to tune this with the spring curve tool
 J
J M
M (whilst we wait for the better solution from Walmis for MSFS that is)
(whilst we wait for the better solution from Walmis for MSFS that is) S
S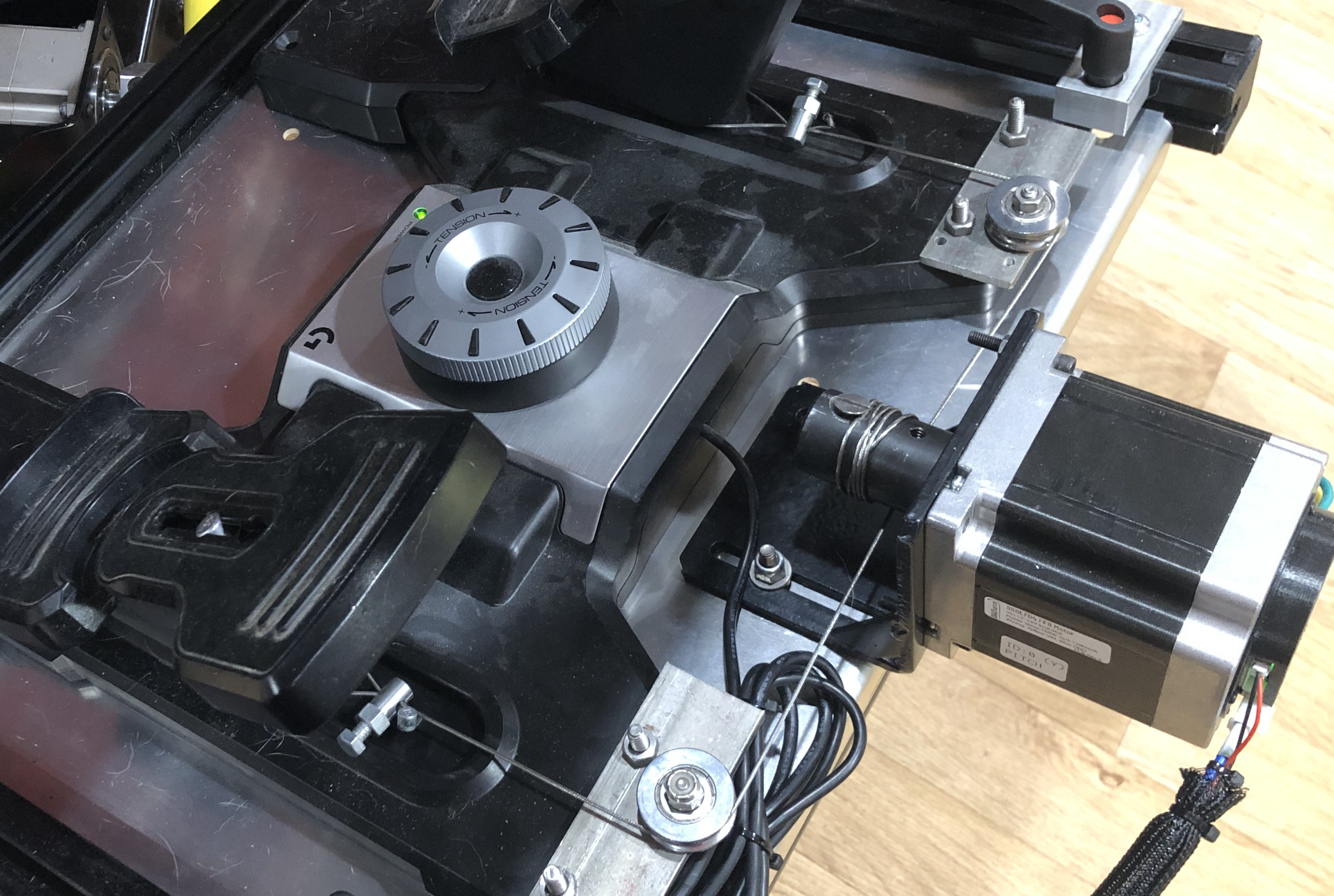
 FF
FF
 T
T J
J TTTTTT
TTTTTT MTSJM
MTSJM S
S W
W BB
BB
 K
K W
W SBIBBBK
SBIBBBK PK
PK MMM
MMM C
C N
N faq .. probably answers a lot of questions you have.
faq .. probably answers a lot of questions you have. PC
PC F
F D
D A
A VK I couldn't model the cable in CAD, but it is anchored and tensioned around the back side of one of the edge pulleys (you cant see it but there is a hole where the tensioning bolt will be right behind the top edge pulley. The other side of the cable is wrapped around another edge pulley and fixed in place. This gives 50 degrees of rotation so I'm still limited by the gimbal arms.
VK I couldn't model the cable in CAD, but it is anchored and tensioned around the back side of one of the edge pulleys (you cant see it but there is a hole where the tensioning bolt will be right behind the top edge pulley. The other side of the cable is wrapped around another edge pulley and fixed in place. This gives 50 degrees of rotation so I'm still limited by the gimbal arms.
 P
P PK
PK J
J











