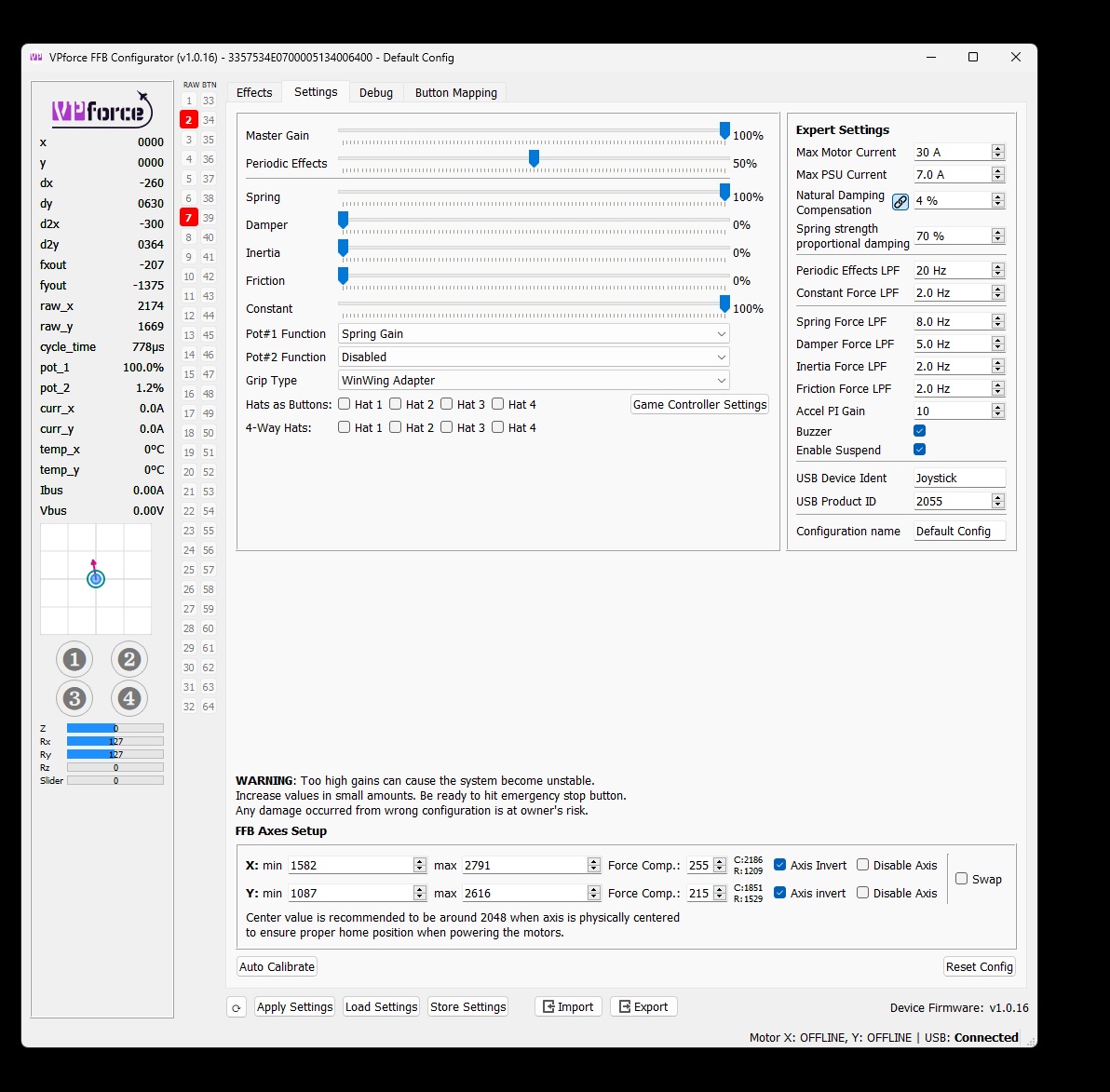
the LPFs are filters that reduce the bandwidth from respective controllers (Spring, damper, etc) signal going to the motors. The motor coils don't energize instantly, hence it's required to reduce the bandwidth to keep it stable.
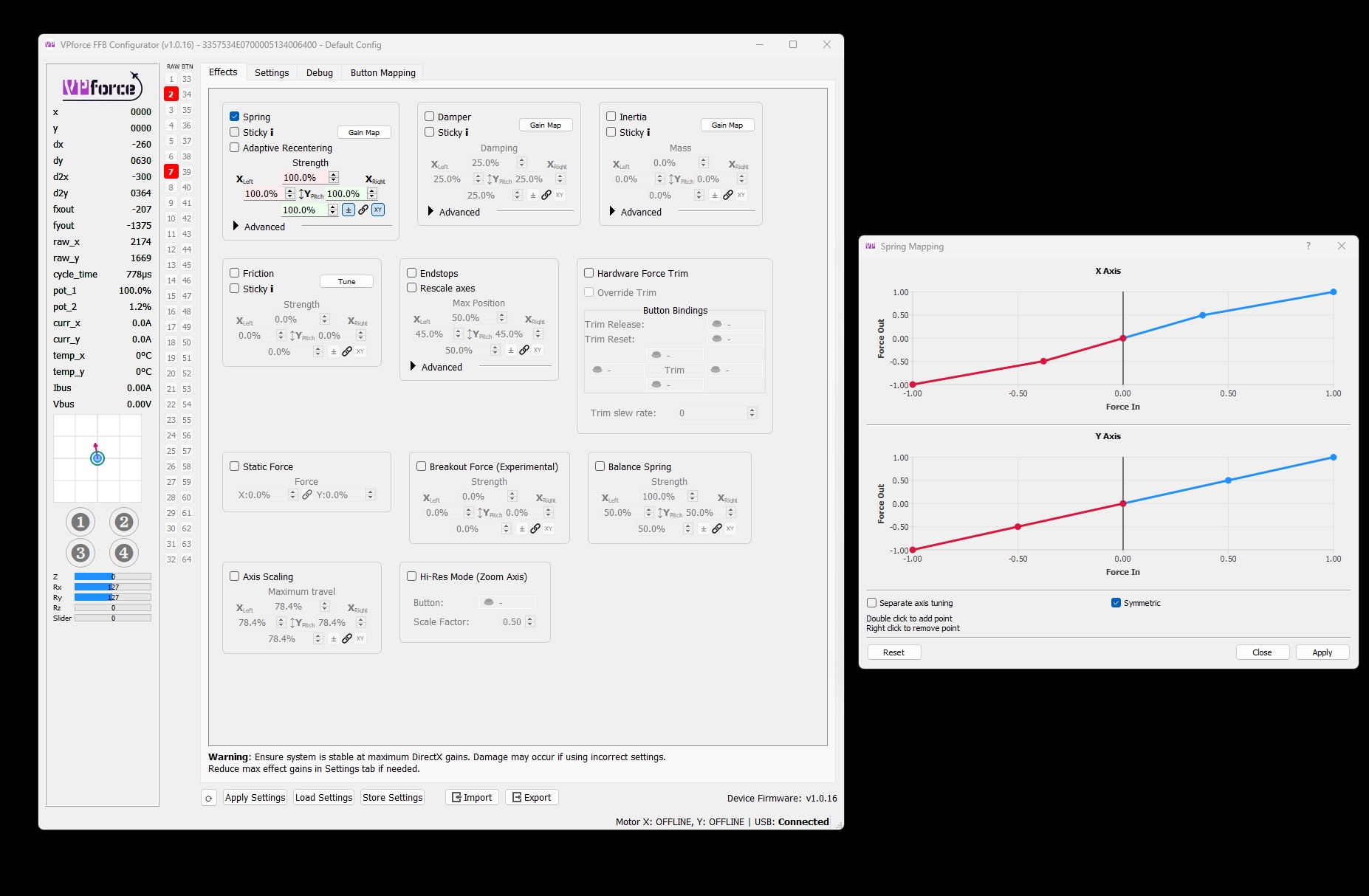
Spring strength proportional damper is essentially damper force that you can adjust manually in Effect tab, but it's strength is automatically modulated related to the spring force gain, configured throw length, etc. i.e. the stiffer the spring the more the damper force is added.
So in short:
The damper LPF should be as high as possible, but too high will cause high frequency oscillations because the motors can't keep up with high frequency high amplitude torque requests and they will fail-safe.
The spring LPF + spring strength prop. damping - best be tuned to specific moment of inertia i.e. grip weight and extension length.