
 W
WThe older motor firmware did not have sleep mode, so it will still anticog.
 J
JOh OK, then I seem to have a older one 
WBut the saving is very minimal: 20mA vs 50mA 
JGood info about the oszillation above. Got pretty wild after update. 
WYeah I was afraid that might happen, since previously math was a bit wrong, but the new settings should allow for better tuning
JWill check tomorrow. Whole bunch of profiles to re tune
 V
Vokay, spring strength porportional damper 100%, spring force LPF 3.0hz, Damper Force LPF 10 hz is working pretty good for me, not sure it was as good as before but its damn close. Increasing spring strength proportional damping to 150% caused the rhino to shutdown after a long beep after I rapidly moved the stick on the X axis. I think it just shut off the x axis motor after tripping a saftey of some kind?
WYeah, damper LPF is a bit too high in this case and it enters a high-frequenncy resonance during faster movements. Try reducing to 8Hz
WThere's a
Reset Motors button in the Debug tab to quickly reset the motors back to operational state J
J anyone?

 J
JI promise, I searched. lol
 J
JBreakout force. I was using this to help find and stay at center. But it doesn't work with trim. I know, experimental. But, seems like it was help hold center or trim center position really well.
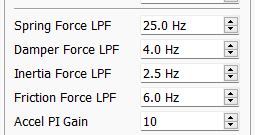
JIs there somewhere some documentation about the "Expert Settings" tab?
I'm by no means an Expert, but I figured out that I need to fiddle with these settings to stabilize my Rhino in certain profiles. I do this via trial and error, because I have no idea what I'm doing. The first 4 have like "tool tips" the rest doesn't.
I'm by no means an Expert, but I figured out that I need to fiddle with these settings to stabilize my Rhino in certain profiles. I do this via trial and error, because I have no idea what I'm doing. The first 4 have like "tool tips" the rest doesn't.
Wthe LPFs are filters that reduce the bandwidth from respective controllers (Spring, damper, etc) signal going to the motors. The motor coils don't energize instantly, hence it's required to reduce the bandwidth to keep it stable.
Spring strength proportional damper is essentially damper force that you can adjust manually in Effect tab, but it's strength is automatically modulated related to the spring force gain, configured throw length, etc. i.e. the stiffer the spring the more the damper force is added.
So in short:
The damper LPF should be as high as possible, but too high will cause high frequency oscillations because the motors can't keep up with high frequency high amplitude torque requests and they will fail-safe.
The spring LPF + spring strength prop. damping - best be tuned to specific moment of inertia i.e. grip weight and extension length.
Spring strength proportional damper is essentially damper force that you can adjust manually in Effect tab, but it's strength is automatically modulated related to the spring force gain, configured throw length, etc. i.e. the stiffer the spring the more the damper force is added.
So in short:
The damper LPF should be as high as possible, but too high will cause high frequency oscillations because the motors can't keep up with high frequency high amplitude torque requests and they will fail-safe.
The spring LPF + spring strength prop. damping - best be tuned to specific moment of inertia i.e. grip weight and extension length.
JThank you. Reason I asked is, I have in some profiles a slight oszillation around center. If I stop it by holding the stick, and release it again, its fine but a slight touch will bring the vibration back. Wonder which would be the best parameter to conquer that.
WThat's the way to tune it, it should be resistant to such nudges. In any case try the defaults: 4Hz Spring, 8Hz damper, 100% Spring strength prop. damping
 B
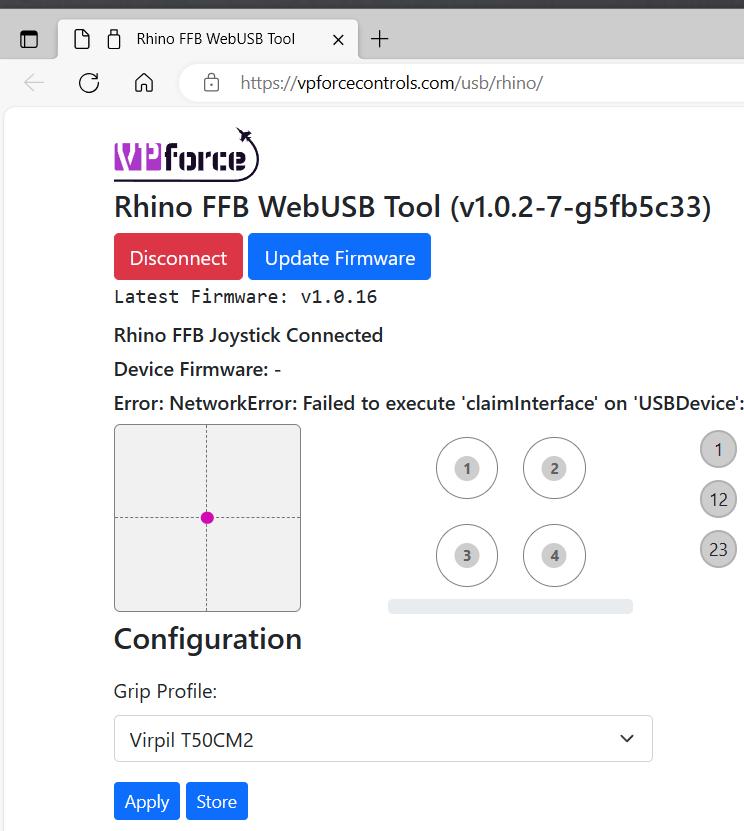
BI can't seem to update my firmware. The stick works, shows in Win10, etc, but I get this:
 B
BUsing Edge.
BDisconnect/reconnect does not help. Power managent for USB disabled.
 B
BNo Joy
WBtw, you haven't changed this in the configurator?
BWilldo. No.
BDoes it matter, whitch DIR to open the power shell?
WNo, just open as an administrator
BOk. I’ll try rebooting.
BGreat success!
 M
MSorry if I am being dumb....see the new 1016 configurator software is out, but where do you get the firmware?
 A
AThat same website where you download the configurator, acts as a firmware updater
AMthank you

 T
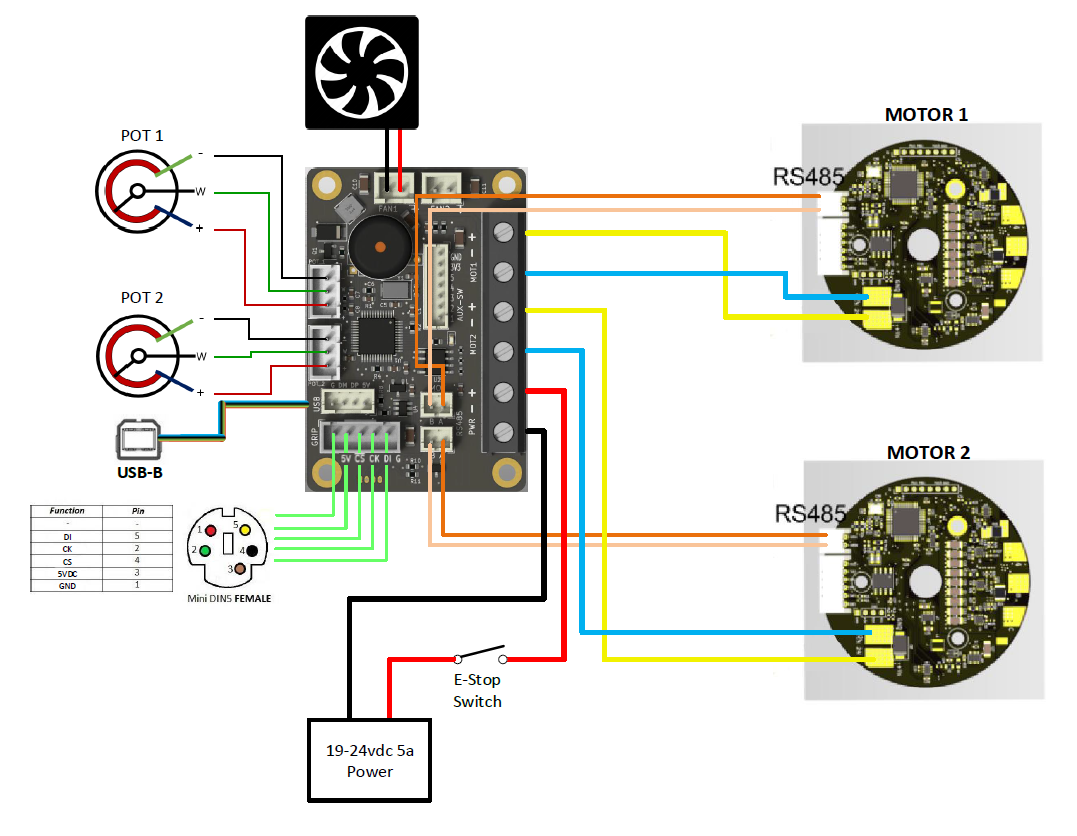
Tin the showcase there are only the Board and the motors at the pictures, but at the FAQ it's mentioned "and wires for quick connection to test" so I would think all necessary connectors and wires are included but I'm not shure, even less after your answer
biggest problem would be the 5pin mini-din cable to connect the Warthog grip, because I could only find 4,6 and 9 pin to buy
biggest problem would be the 5pin mini-din cable to connect the Warthog grip, because I could only find 4,6 and 9 pin to buy

 S
SThere you go.....
These two together and a soldering iron....you are good to go.
https://www.digikey.com/en/products/detail/cui-devices/MD-50PL100/500828
https://www.amazon.com/gp/product/B09SX5LBRG/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1
These two together and a soldering iron....you are good to go.
https://www.digikey.com/en/products/detail/cui-devices/MD-50PL100/500828
https://www.amazon.com/gp/product/B09SX5LBRG/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1
Keszoox XH 2.54mm Male & Female JST Connector Kit with 22AWG Pre-Crimped Cables Wire,(Total 90Pcs) 2/3/4/5/6/7/8/9/10 Pin Housing JST Adapter Cable Connector(5 Colors 150mm)

 N
Nhere's an additional source where I got mine... https://www.showmecables.com/by-category/connectors-adapters/din/5-pin-din
ShowMeCables
5 Pin DIN Connectors. Standard DIN and Mini DIN both available. Straight and panel-mount connector options. Available in 180°, 240°, 270°, and 360° styles in both male and female. Plastic and metal shell casing options. Same Day Shipping. Hassle-Free Returns. Lifetime Warranty. Live Support.
 S
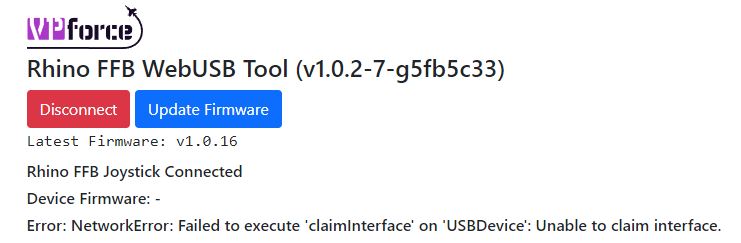
SI'm getting this error trying to update the firmware
Any idea ?
Any idea ?
 S
SAh, I just saw the same problem was already mentioned above, I'll try the given solution tomorrow.
Awith the firmware/software update, are these the new recommended settings for LPF?
 A
Aor are there some new defaults that would be recommended
 V
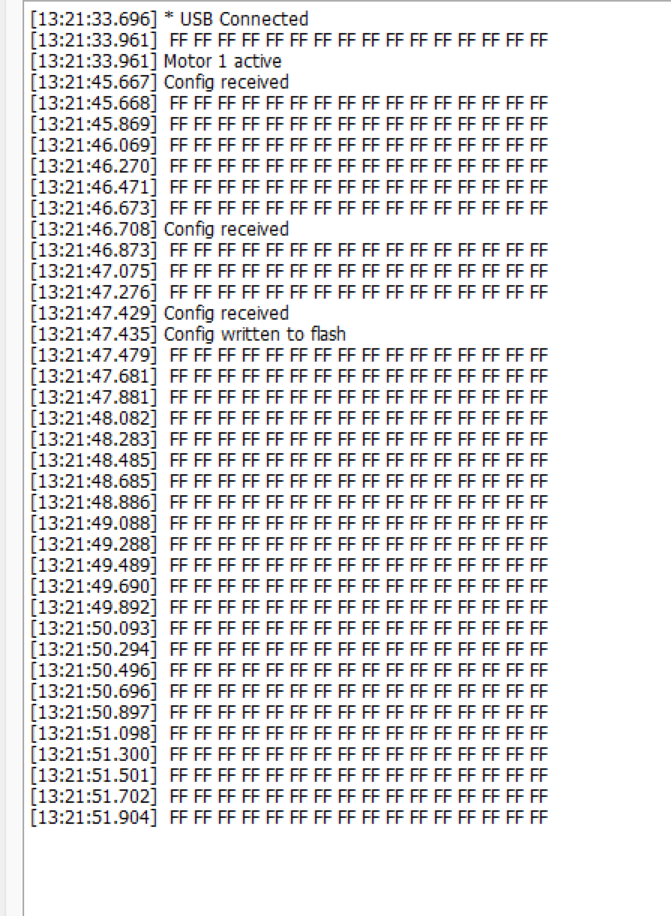
VHi, I just received the winwing adapter. But the button presses are not detected. I checked multiple times and the connection with the base seems good to me.
however i tested putting the debug grip.
And i see FFs only
however i tested putting the debug grip.
And i see FFs only
Vas seen in this image
 V
VI think i solved it...I had to unscrew the little spacer below the base of the adapter, maybe with it the pins didn't enter their holes.
 B
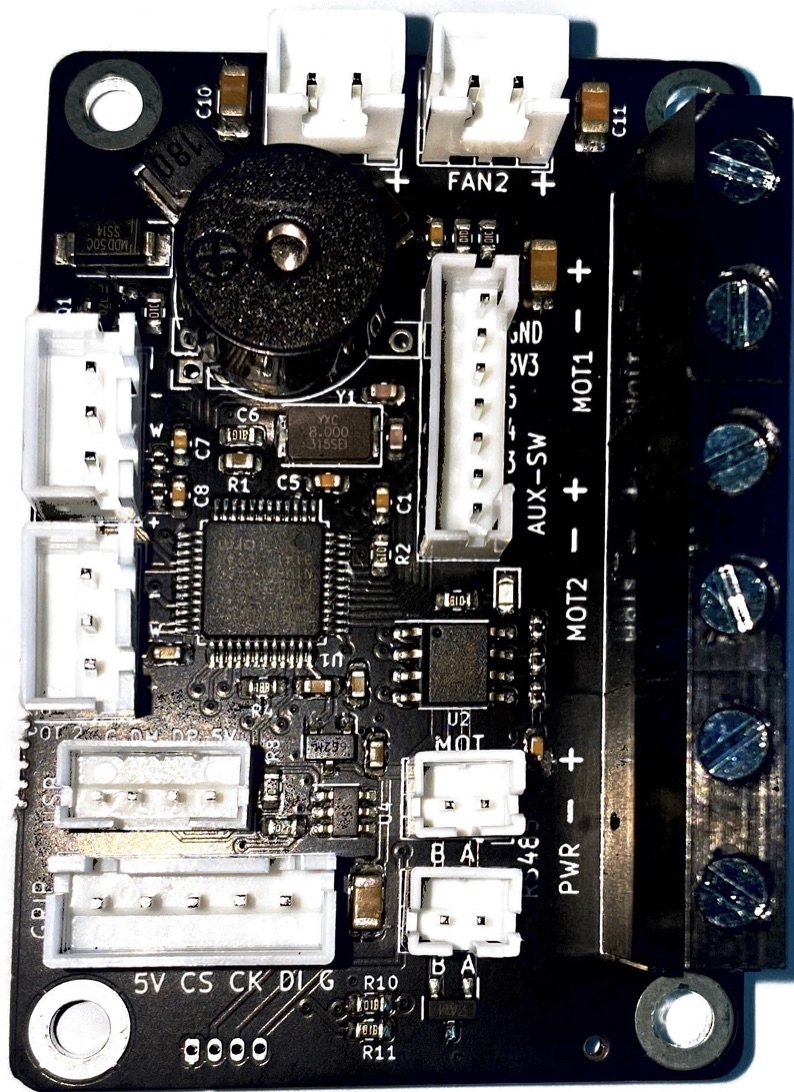
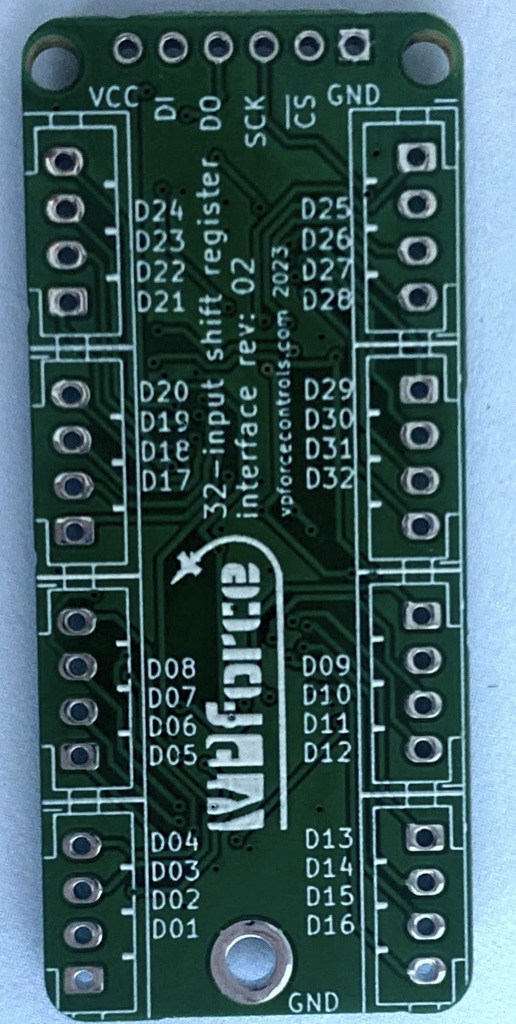
BAny tips of how to wire the grip board ? There are 6pins on the grip board and 5 on the main board - which pin do I not wire up 
 S
SSo I did a quick test after attaching the base, firmware up-to-date, calibration done, nothing else modified.
FFB activated in DCS, power on (big red know on).
20 cm extension and TM F-18 grip.
And I'm like : where is my force feedback ?
The forces are so light, it feels like my old base (Virpil T-50CM2) with the lightest springs and tension tuned to the minimum...
Turned the black knob all the way to the right, it's slightly better but so so light compared to any real plane I ever flew (from small to big ones, props and jets).
So what did I miss ?
I tested with the Spitfire, Tomcat, Mirage F1, Harrier.
The Spit and the Tomcat are nice, but the forces are too light, and not increasing/decreasing with an increase/decrease of speed (the stick should become stiffer the faster you go and should become more "sluggish" when you slow down)
FFB activated in DCS, power on (big red know on).
20 cm extension and TM F-18 grip.
And I'm like : where is my force feedback ?
The forces are so light, it feels like my old base (Virpil T-50CM2) with the lightest springs and tension tuned to the minimum...
Turned the black knob all the way to the right, it's slightly better but so so light compared to any real plane I ever flew (from small to big ones, props and jets).
So what did I miss ?
I tested with the Spitfire, Tomcat, Mirage F1, Harrier.
The Spit and the Tomcat are nice, but the forces are too light, and not increasing/decreasing with an increase/decrease of speed (the stick should become stiffer the faster you go and should become more "sluggish" when you slow down)

 �
�Great! Is it also recognizing the grip now?

 �
�Try some of the other profiles 📙knowledge-baseRhino Profile Sharing (though you probably have to recalibrate for your stick) . Primarily you need to increase Friction, Inertia, and Damper to get a heavier feeling. Feel free to experiment.
B@subsonic1748 Thanks a lot
Npost screenshots of your configurator settings (both settings and effects tabs)