Has anyone ever brake it like me?I have a 40cm extension and i broke it with the F4E
Has anyone ever brake it like me?I have a 40cm extension and i broke it with the F4E


 W
W D
D T
T T
T HHH
HHH N
N
 SS
SS NHHS
NHHS HSS
HSS SWHDW
SWHDWconfigs/RHINO-defaults.vpconf, DD W
W LNLN
LNLN D
D FWF
FWF A
A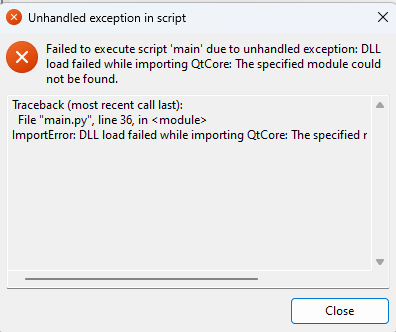 NHWA
NHWA lol I was trying to run inside the folder but it works now
lol I was trying to run inside the folder but it works now SSSN
SSSN
 VSSFFF
VSSFFF LW
LWconfigs/RHINO-defaults.vpconf







