The problem is that we don't know the true maximums. The system can have different motors / drive ra
The problem is that we don't know the true maximums. The system can have different motors / drive ratios / weights and that contributes to different stability margins.
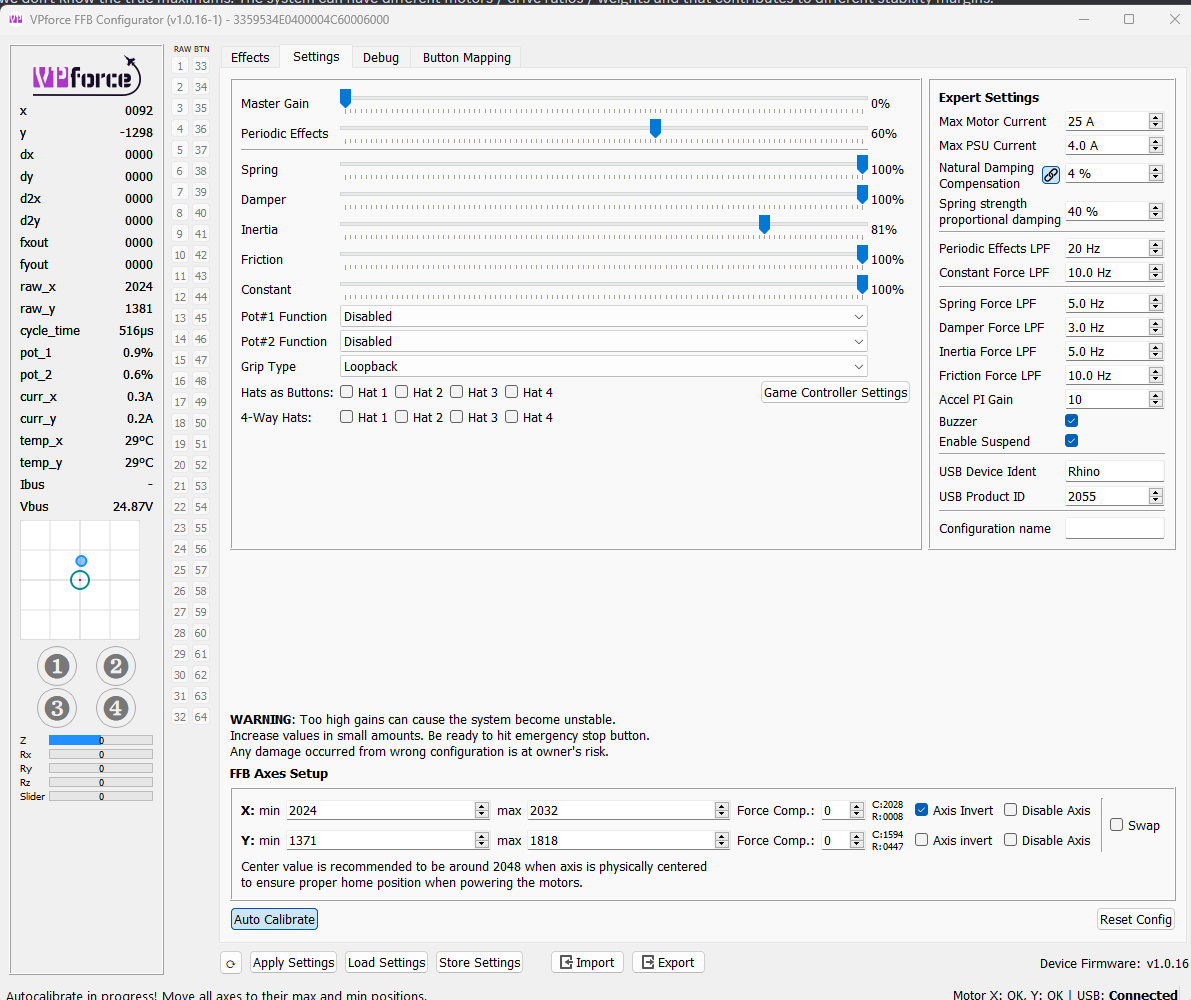
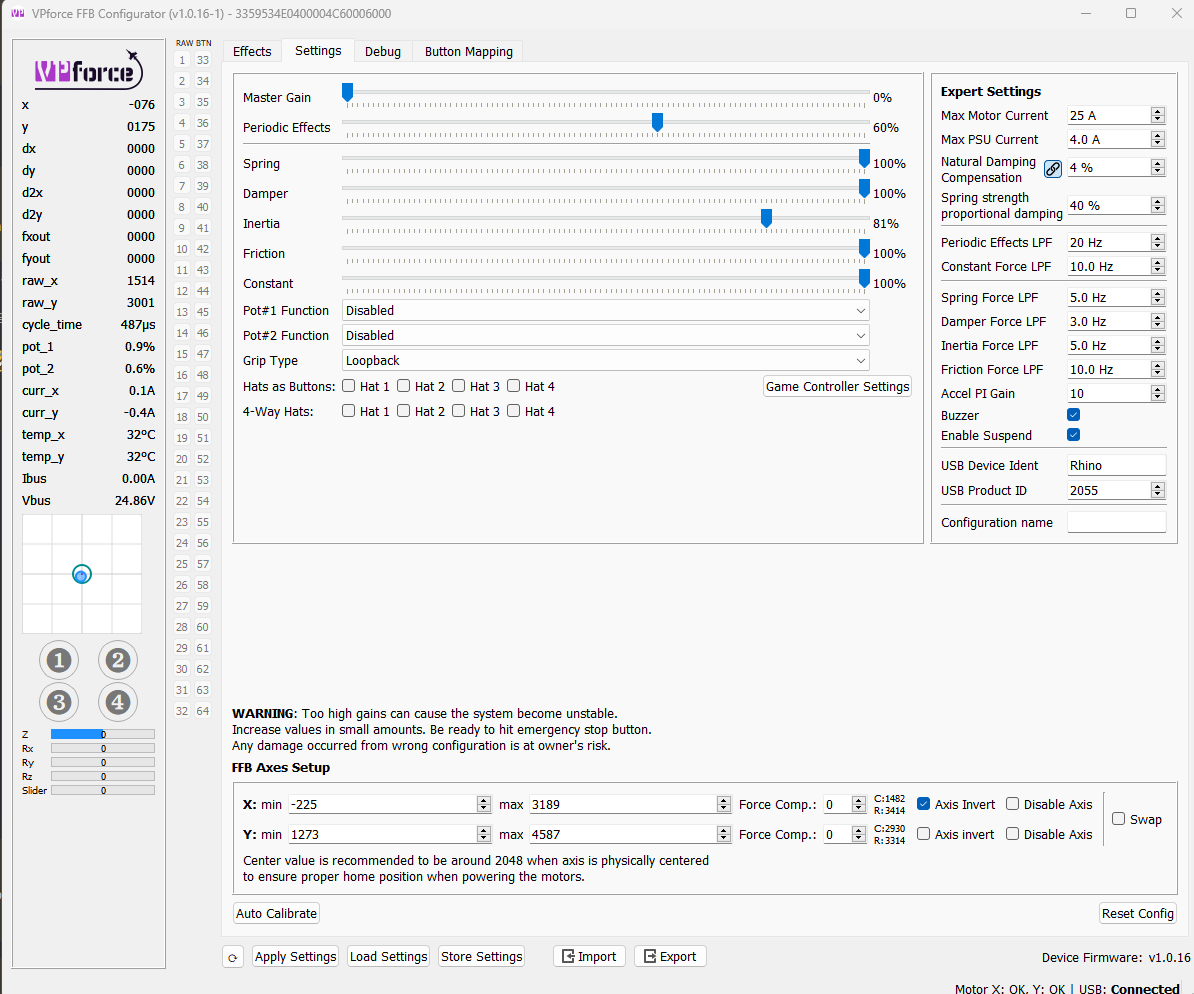
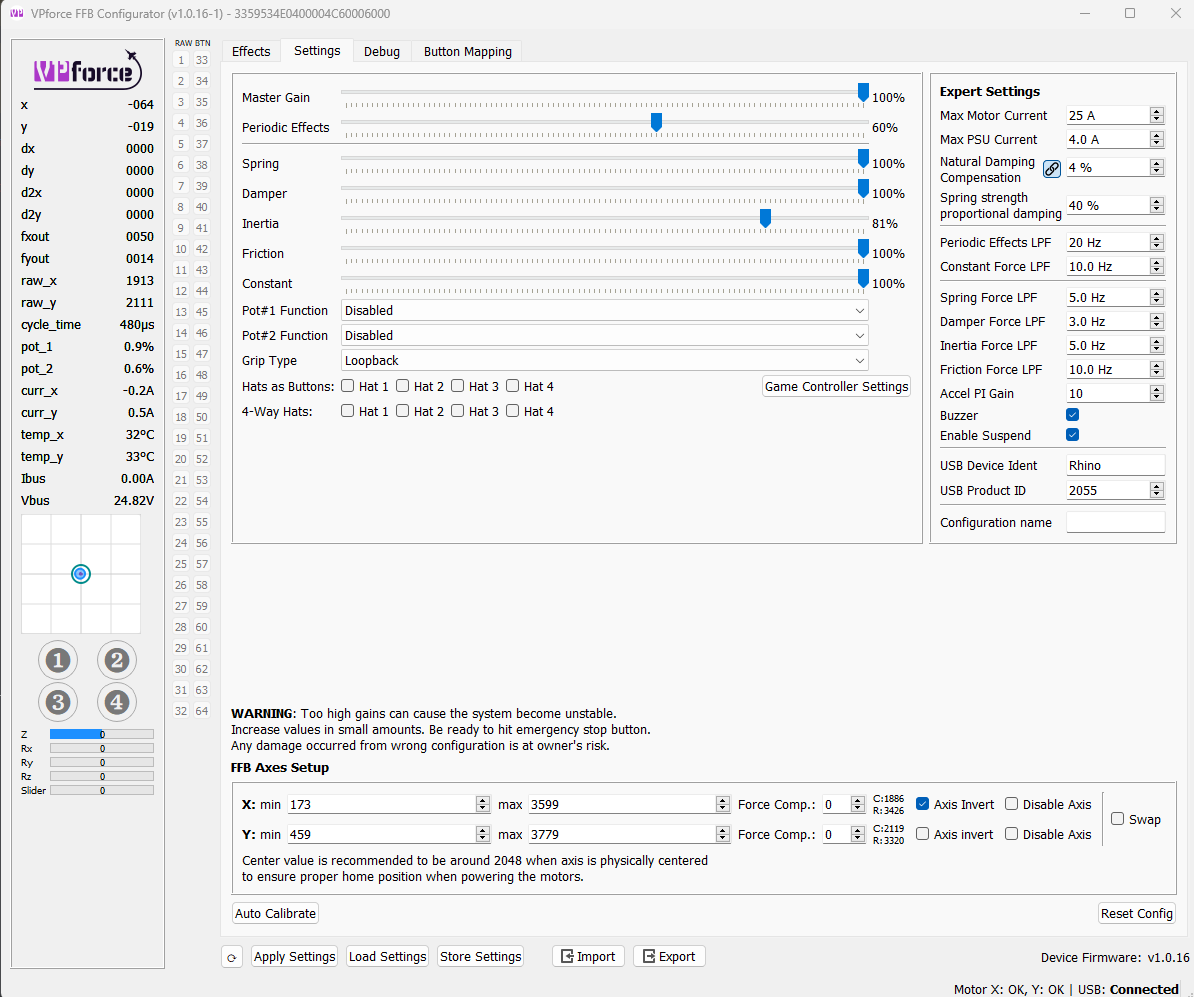
- The sliders in the Settings tab set the per effect global limits
- The basic effects in the Effects tab (such as Spring, Damper) create a on-device effect similarly how an FFB application would and adheres the limits set in the settings tab. Those effects (in Effects tab( are overriden when an FFB application takes over.