Much appreciated suggestion, Number481. I’ll try the script tomorrow.
Much appreciated suggestion, Number481. I’ll try the script tomorrow.
 W
W HWHWH
HWHWH NWN
NWNdev.product_string in addition to the PID check. S
S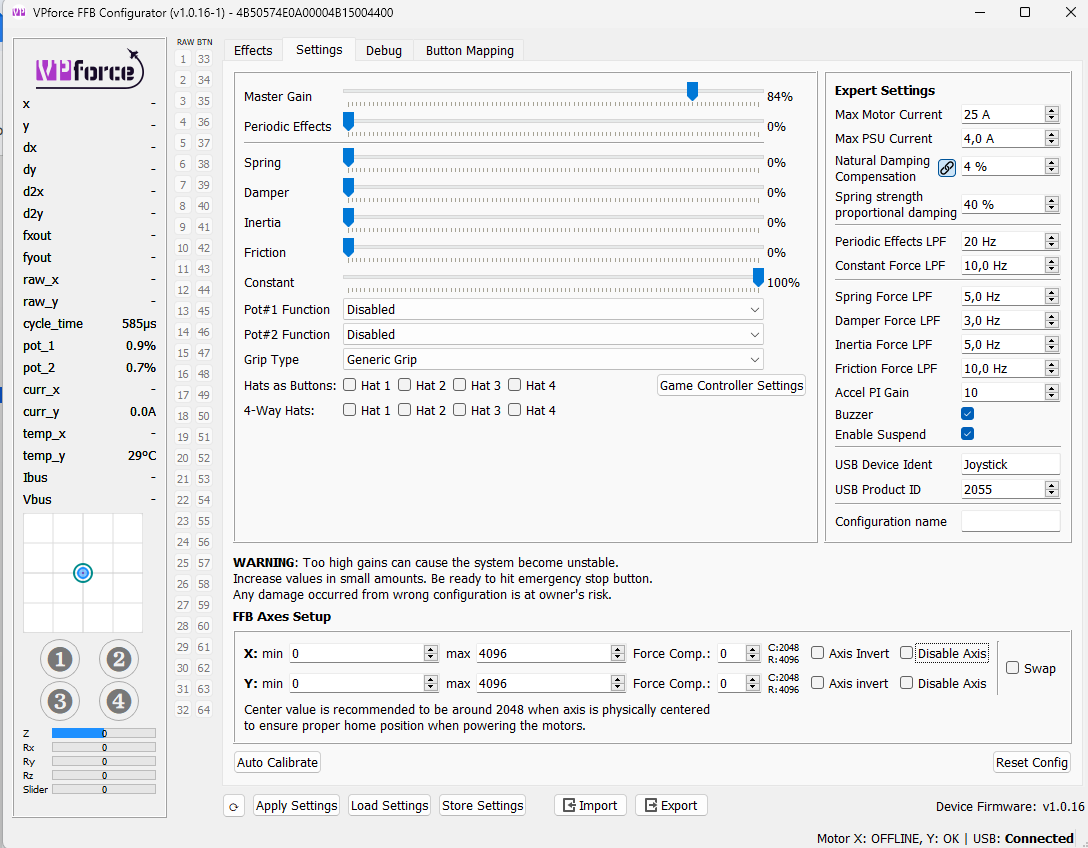 NHS
NHS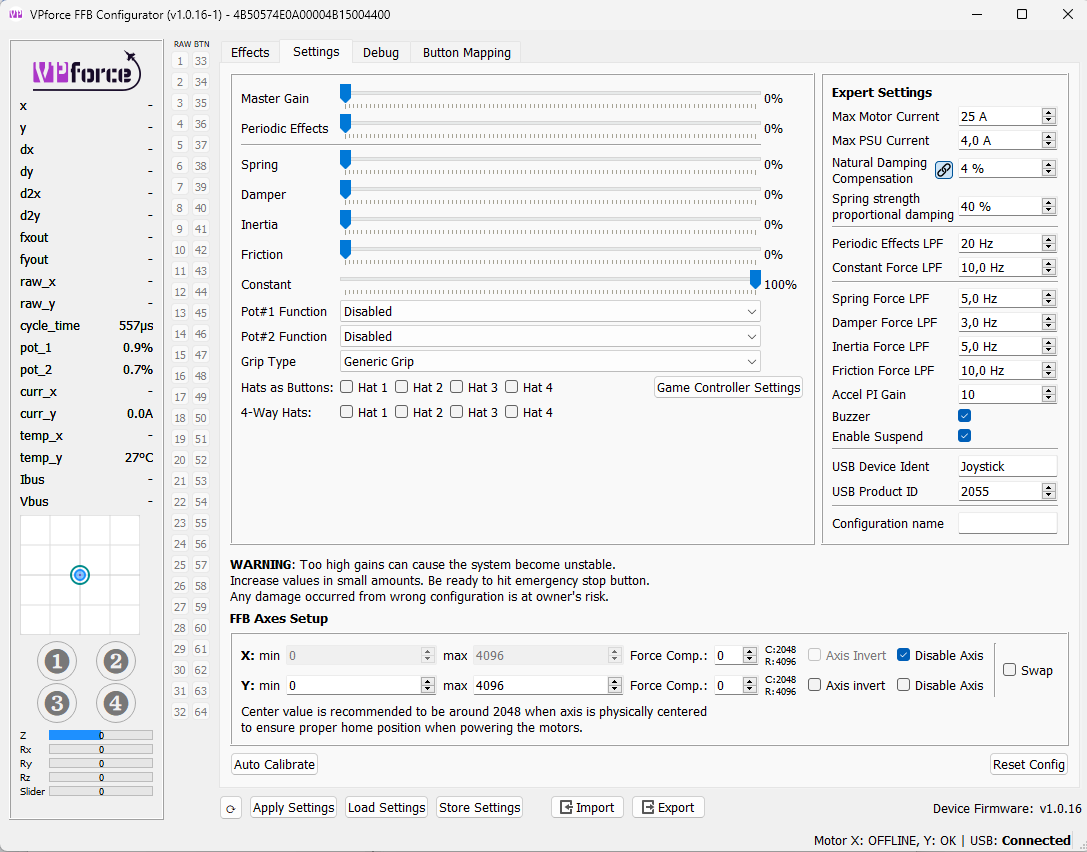 N
N H
H
 TNS
TNS R
R TTWRW
TTWRW
 CCCCTCC
CCCCTCC
 WC
WC OTN
OTN SO
SO L
L

 C
C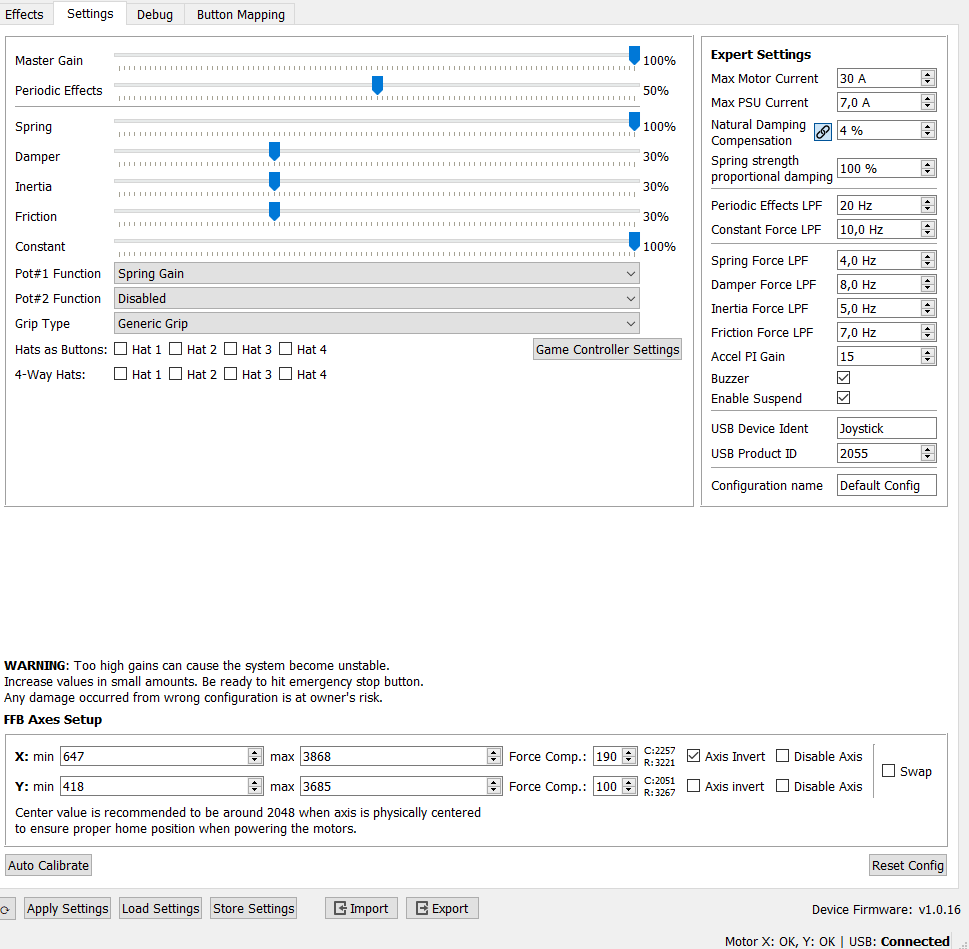
 DTO
DTO

 H
H HHNHHH
HHNHHHdev.product_string







